
Dies ist eine alte Version des Dokuments!
Inhaltsverzeichnis
Foto-Reihe für den Zusammenbau, V3.3
Holz-Rahmen
Rahmen zu einem T-Stück verkleben (viel kleber und rechtwinkelig ausrichten). Hilfslinien mit je 90mm vom Rand nach innen zeigen die Mittenposition gut an.
Erste Lötübung
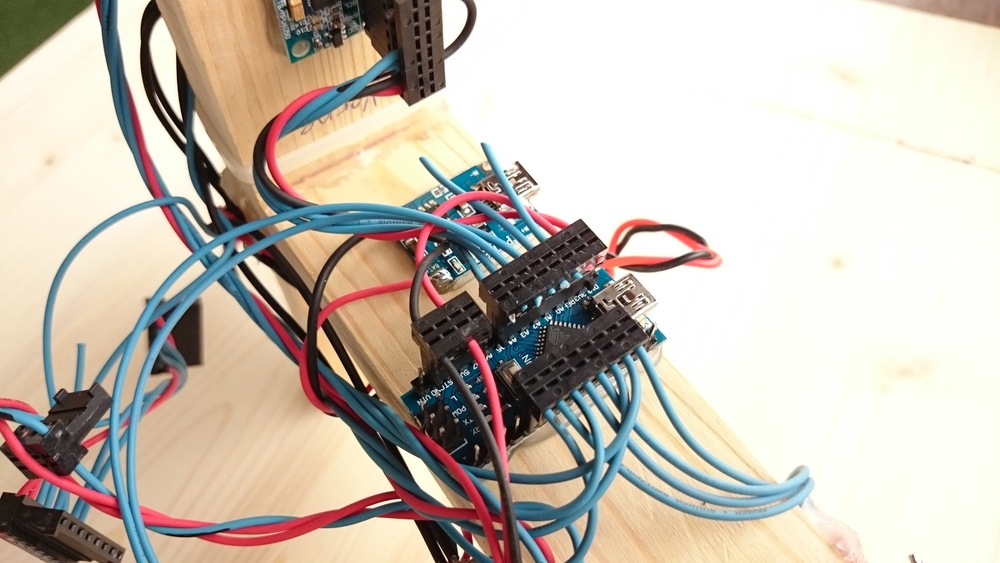
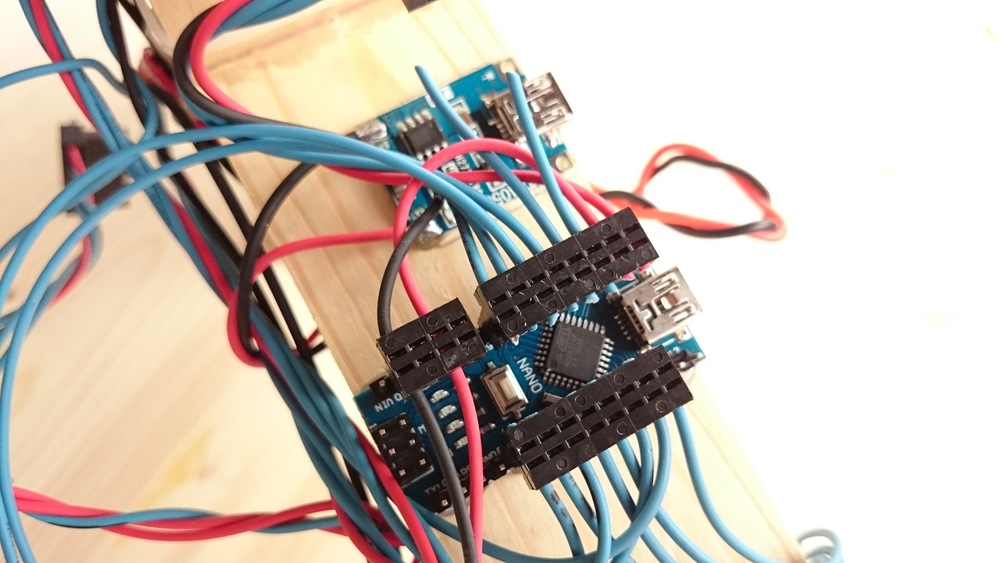
Stiftleisten des Arduinos einlöten:
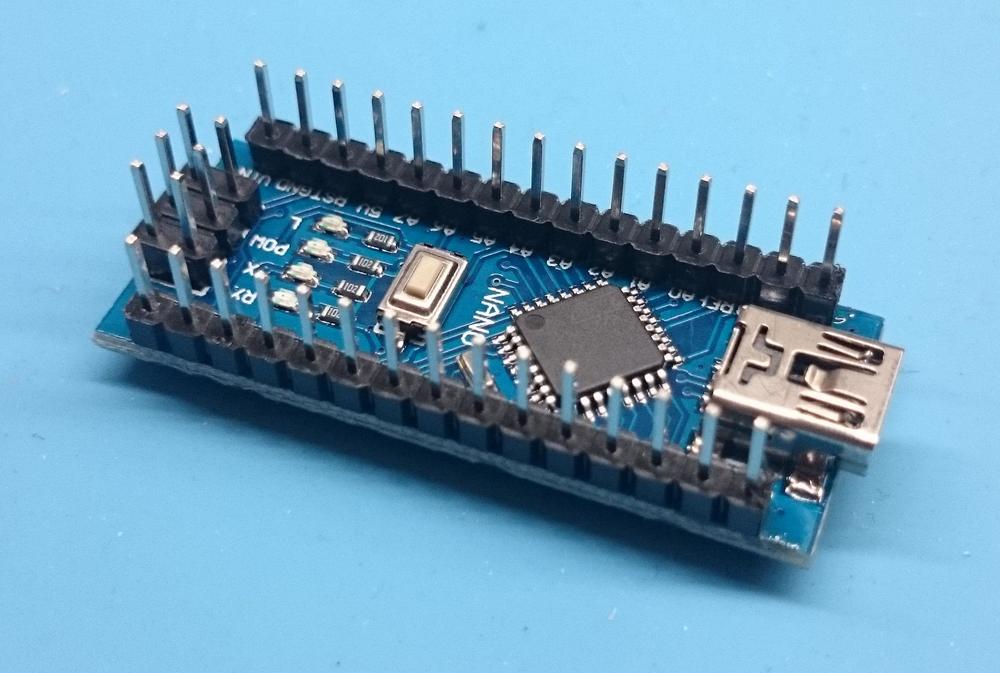
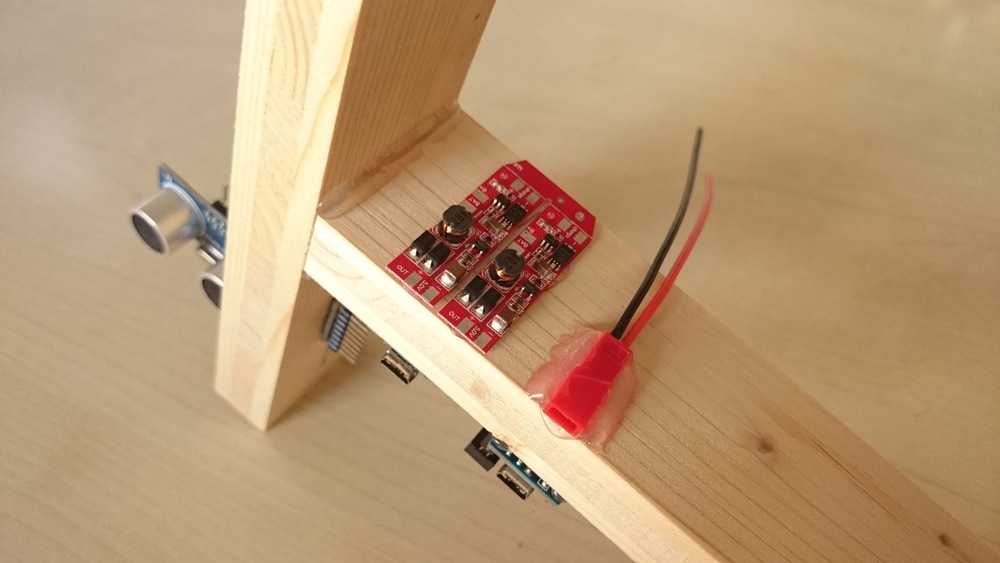
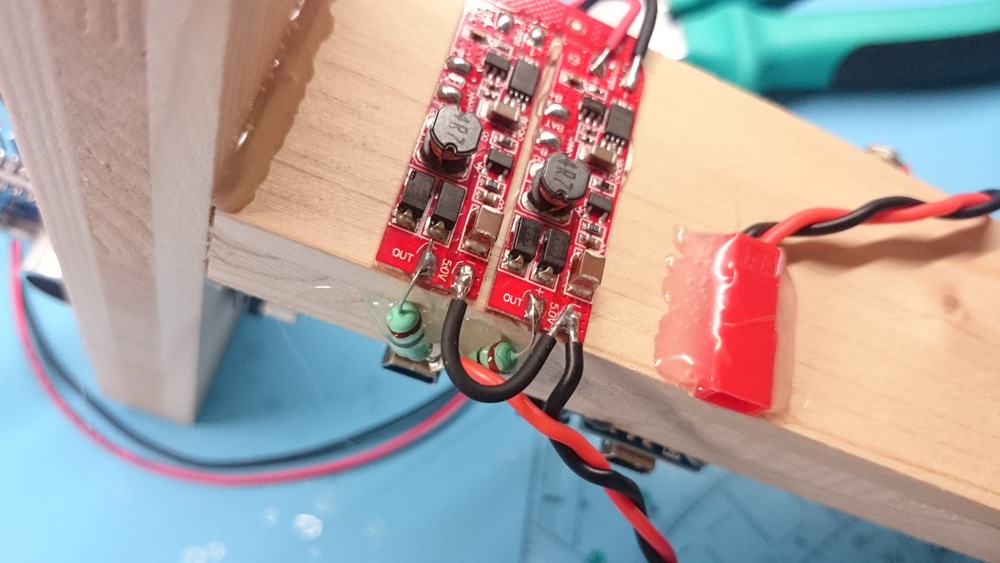
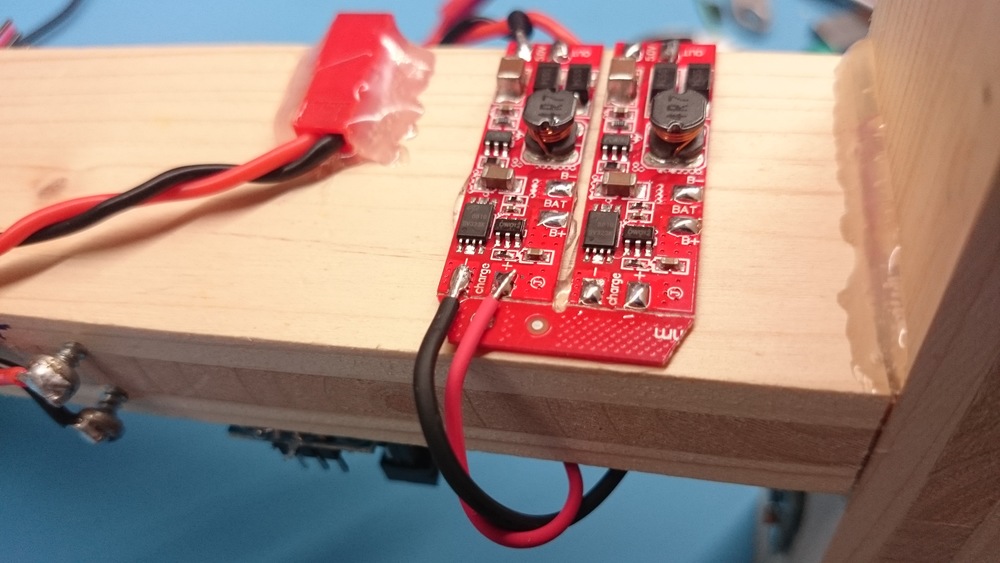
Der Stecker
muss gut fixiert werden; die schwarzen Knubbel (Induktivitäten) zeigen nach oben (Charge = Rückseite, +5V = Vorderseite). Von oben und zwischen BMS und Stecker je 15mm frei lassen:
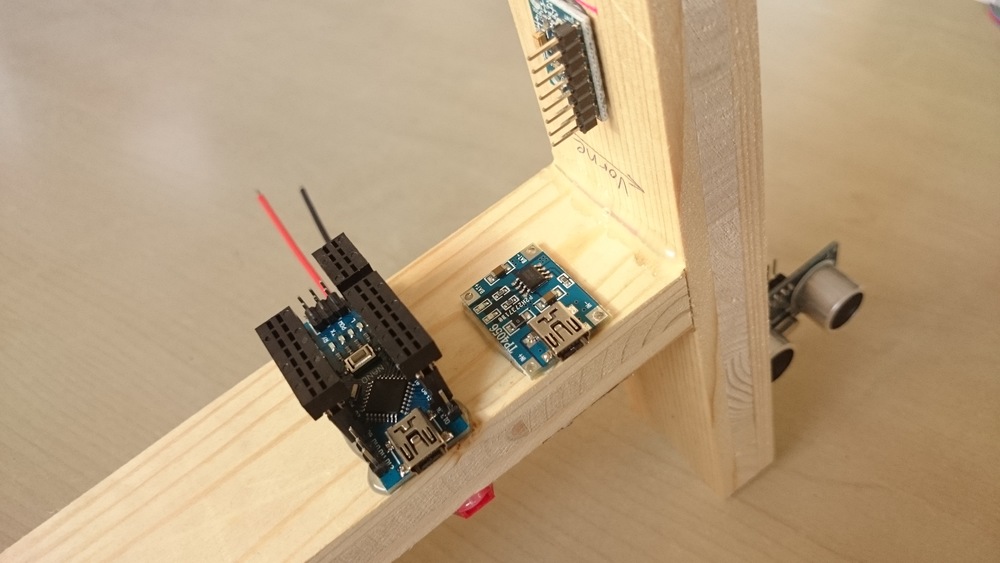
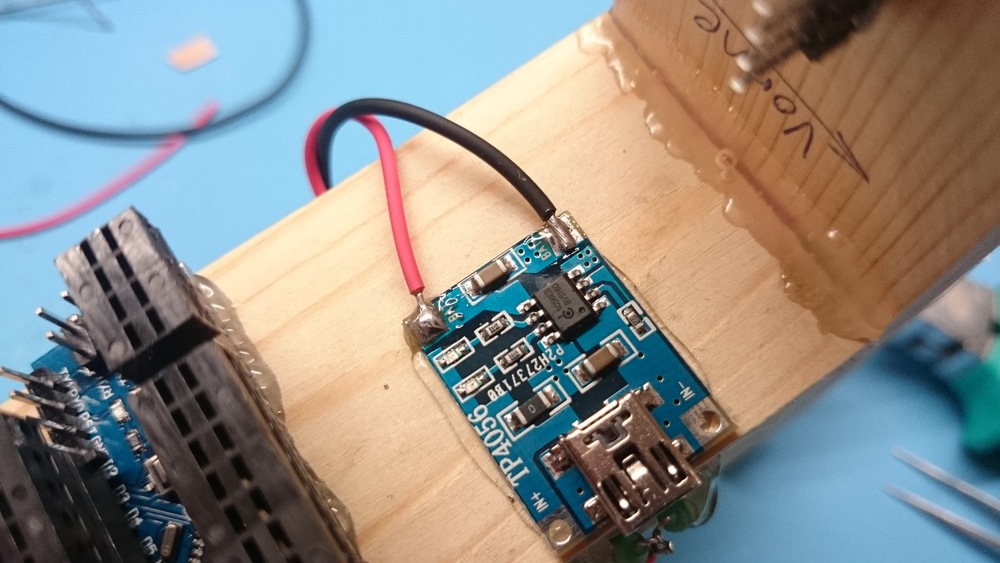
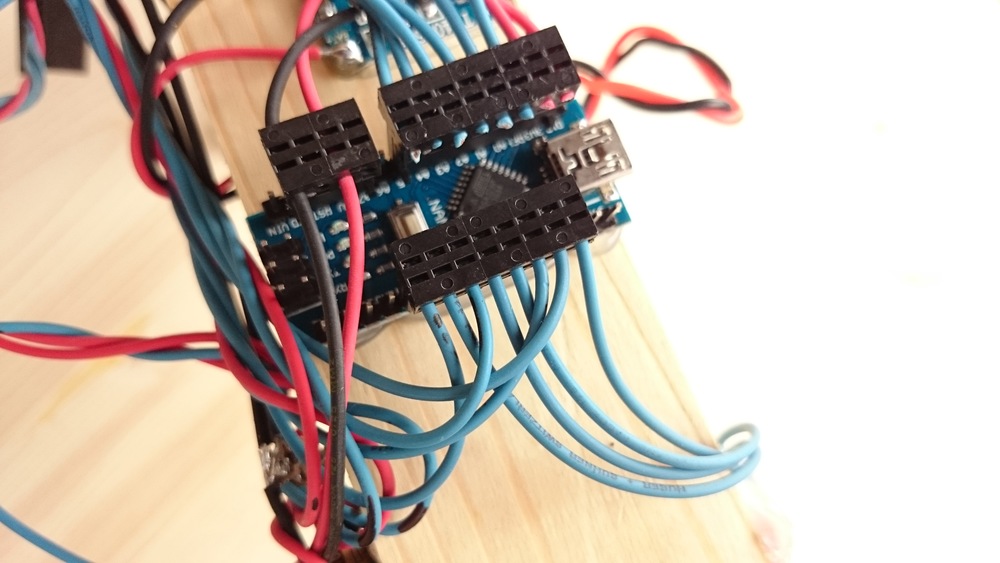
Der Arduino und das Lademodul.
Beide USB-Buchsen zeigen nach vorne. Auch hier wieder je 15mm frei lassen:
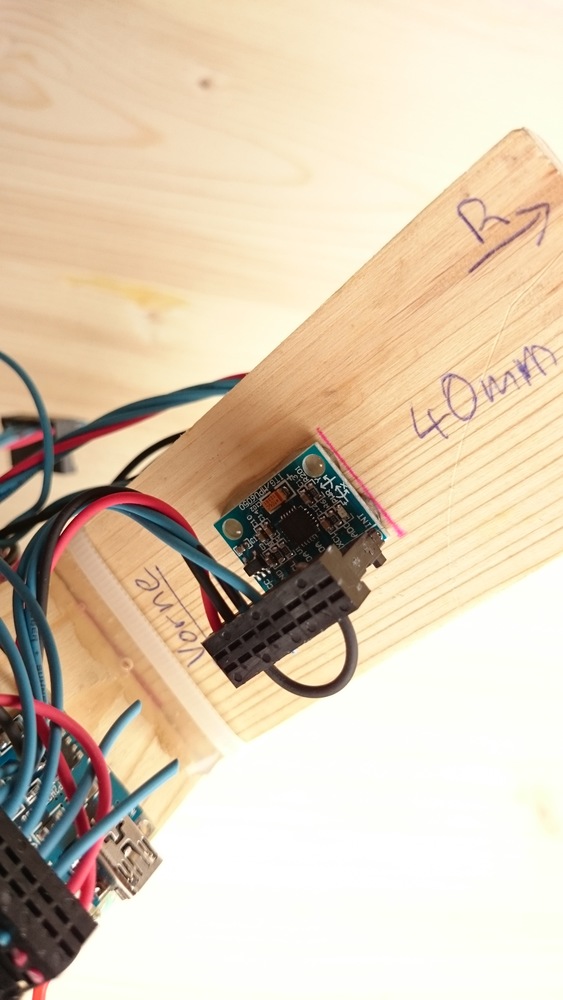
Die IMU
40mm vom Rand nach innen rutschen, Pins sind an der Vorderseite des Robos. Die IMU ist auf der rechten Seite:
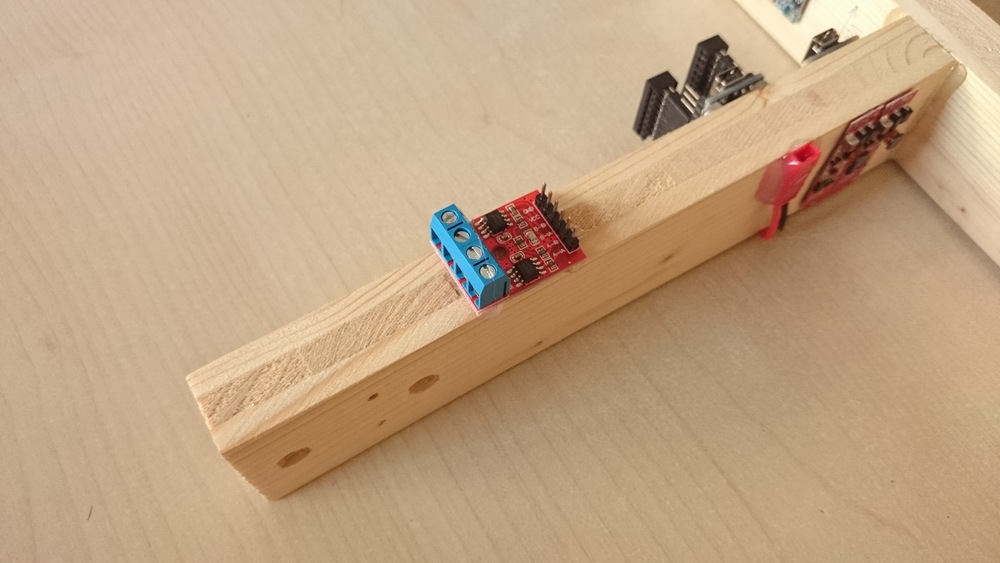
Die Doppel-H-Brücke
ist 60mm vom unteren Rand entfernt. Schraubklemmen zeigen nach unten:
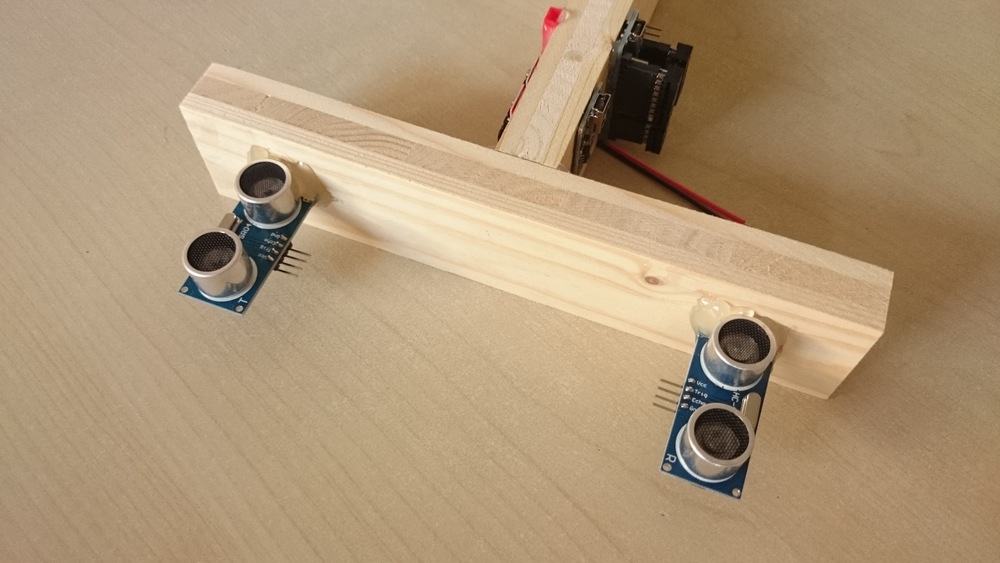
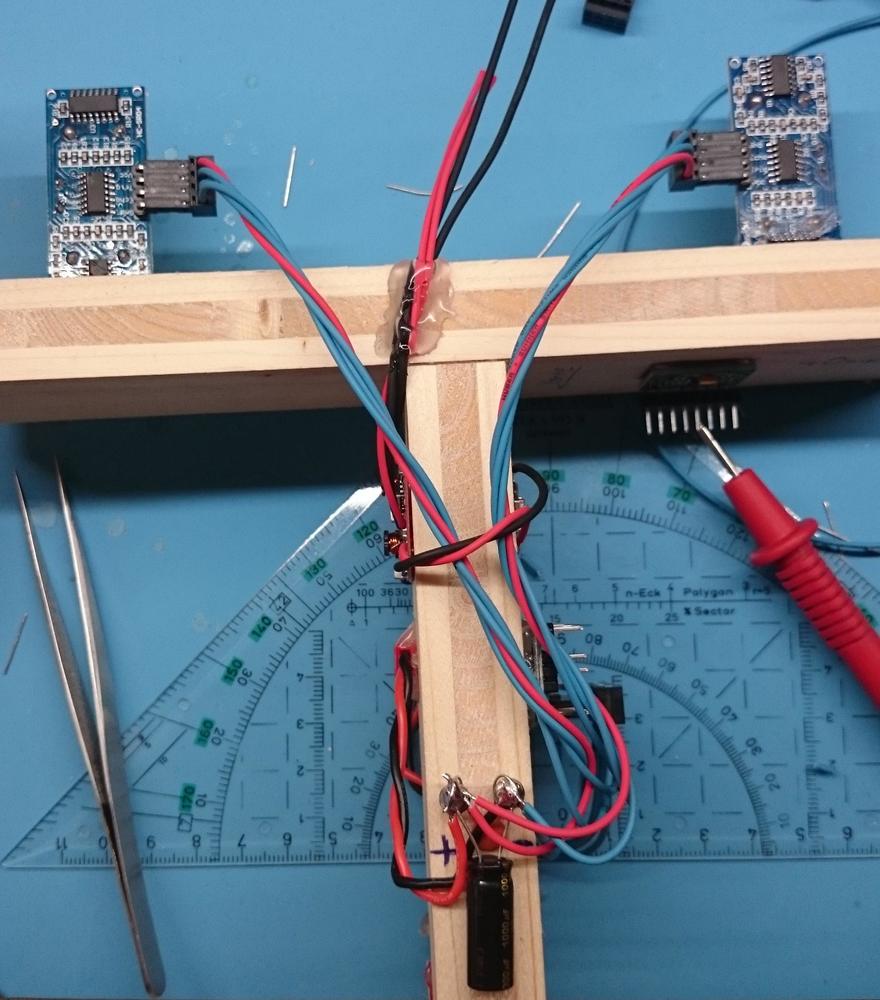
Die Ultraschallsensoren
sind je 20mm vom Rand nach innen gerückt, und zeigen gerade nach vorne:
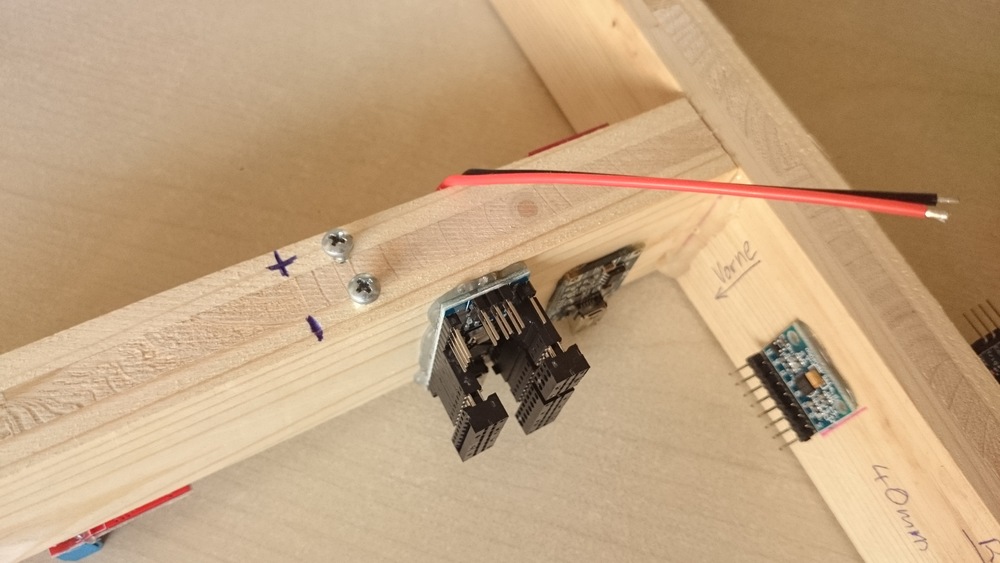
Die Schrauben
sind 125mm von unten entfernt und sind die Lötstützen für die 5V-Versorgung. Polarität wie im Foto:
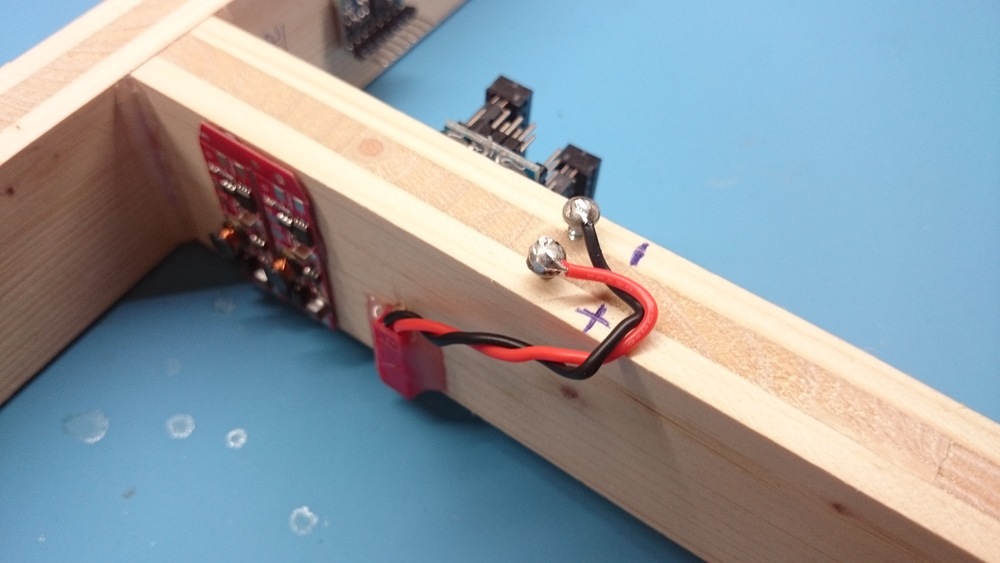
Steckerkabel
etwas kürzen und anlöten (rot ist plus, schwarz minus). Davor werden die Schrauben ordentlich verzinnt (Achtung: das dauert ein wenig, bis die Schrauben die Temperatur erreichen).
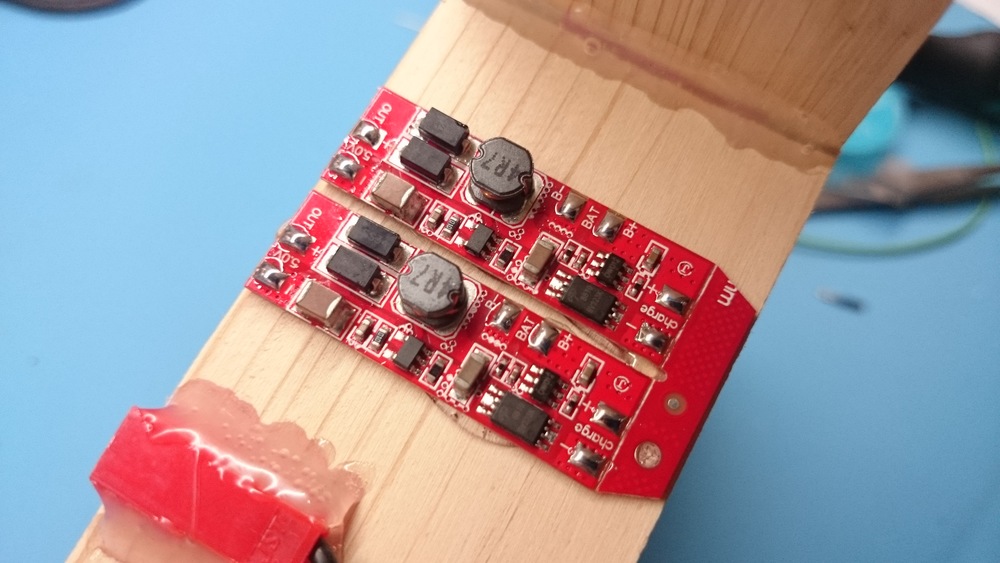
Die Pads der BMS
werden verzinnt. Die Lötstellen sollten gleichmäßig rund und glänzend sein.
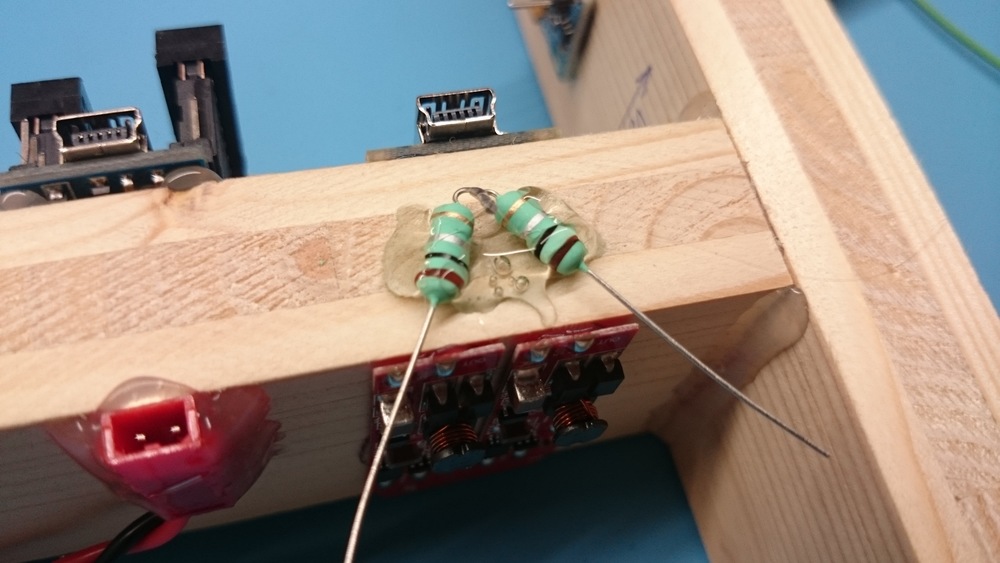
Die 0.1Ω-Widerstände
werden verdrillt und dort verlötet. Dann werden sie am Rahmen fixiert, sodass die langen Drähte dann gut bei den +5V der BMS angeschlossen werden können:
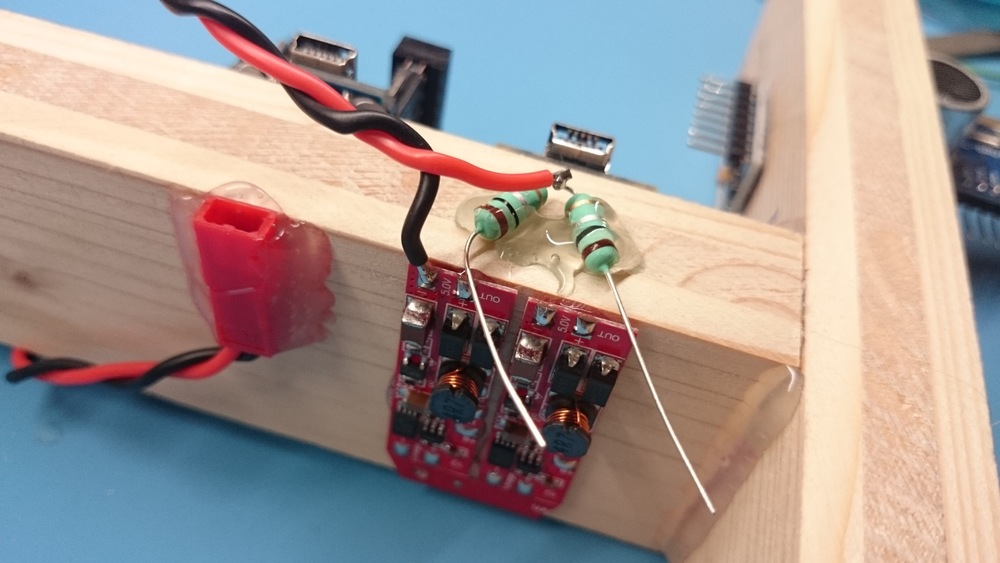
Das Buchsen-Kabel
wird am Minus-Pol des unteren BMS und an der Mittelanzapfung der Widerstände angelötet.
Die Masse-Brücke
ist 30mm lang und verbindet die beiden BMS:
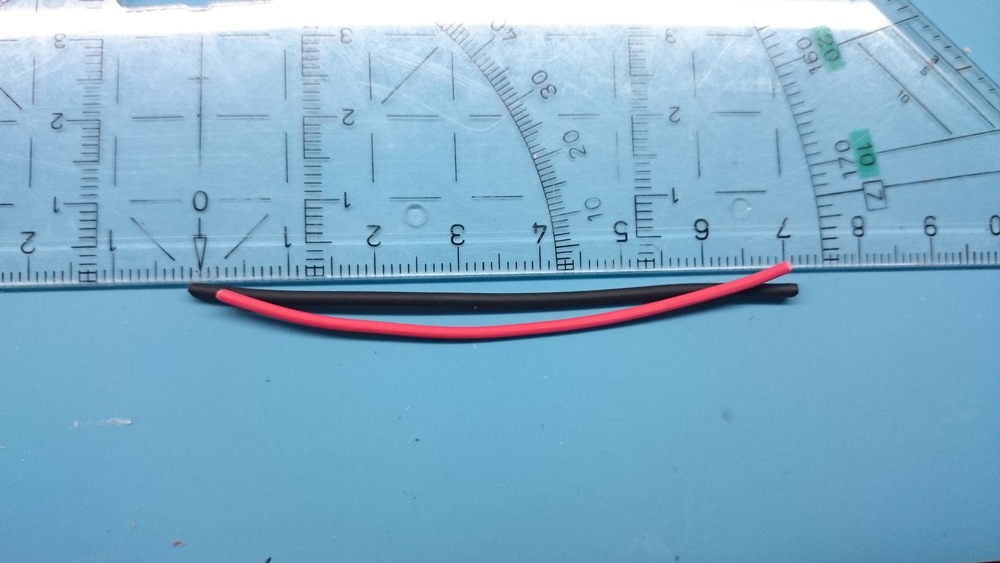
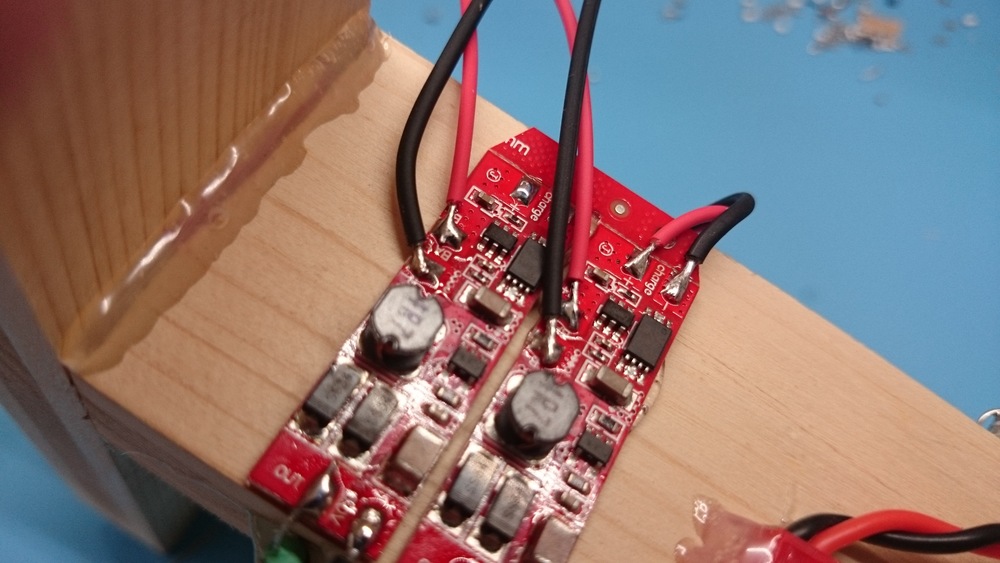
Das Lademodul
wird mit 7cm-langen Drähten mit einem der beiden BMS verbunden. Plus auf Plus, Minus auf Minus.
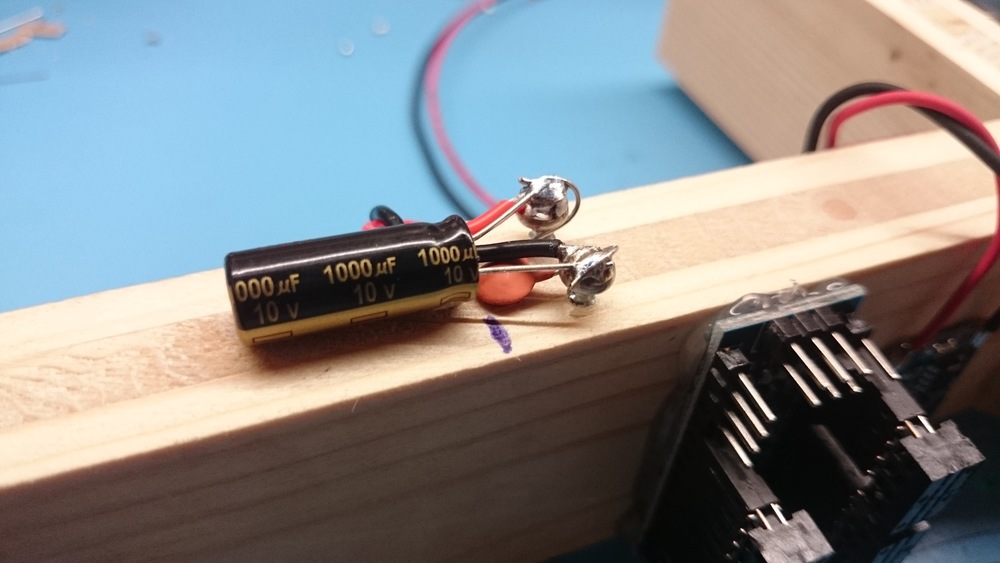
Der ELKO und KerKo
(Aluminium-Elektrolytkondensator und Keramikkondensator) werden mit den Lötstützen verbunden. WICHTIG: Polarität des ELKOs (Minus-Markierung muss auf Minus-Pol):
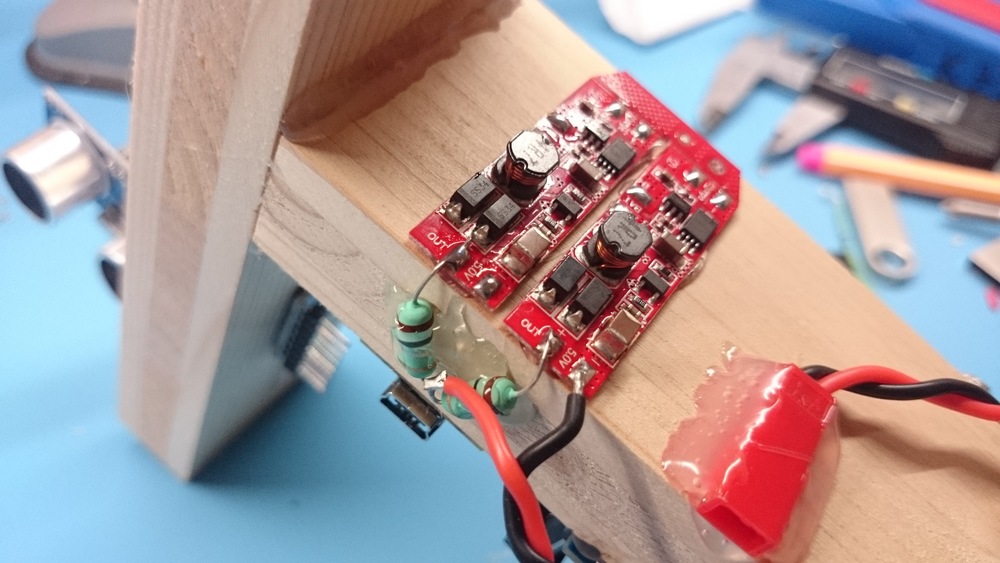
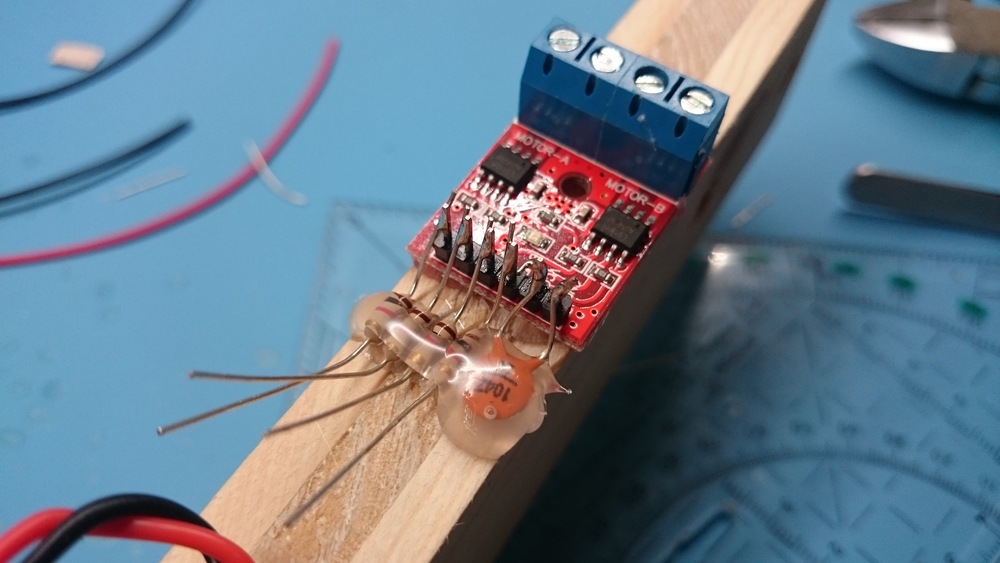
Widerstände und den Kondensator
zuerst zurechtbiegen, und diese dann in eine Spur Heißkleber drücken.
Anschließend mit reichlich Kleber fixieren:
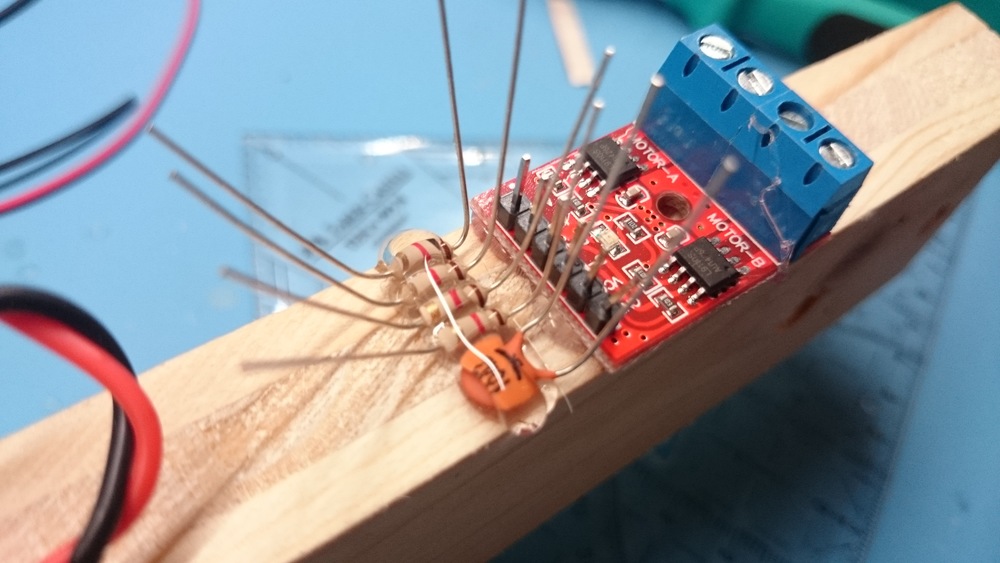
Dann alle 6 Anschlüsse sauber verlöten:
Kabelbäume vorbereiten
siehe hierzu den Schaltplan
Die Batterie-Drähte
mit je 12cm werden schon mal an die BMS gelötet. Drähte so kurz wie nötig abisolieren.
Die Drähte werden an der Rückseite fixiert:
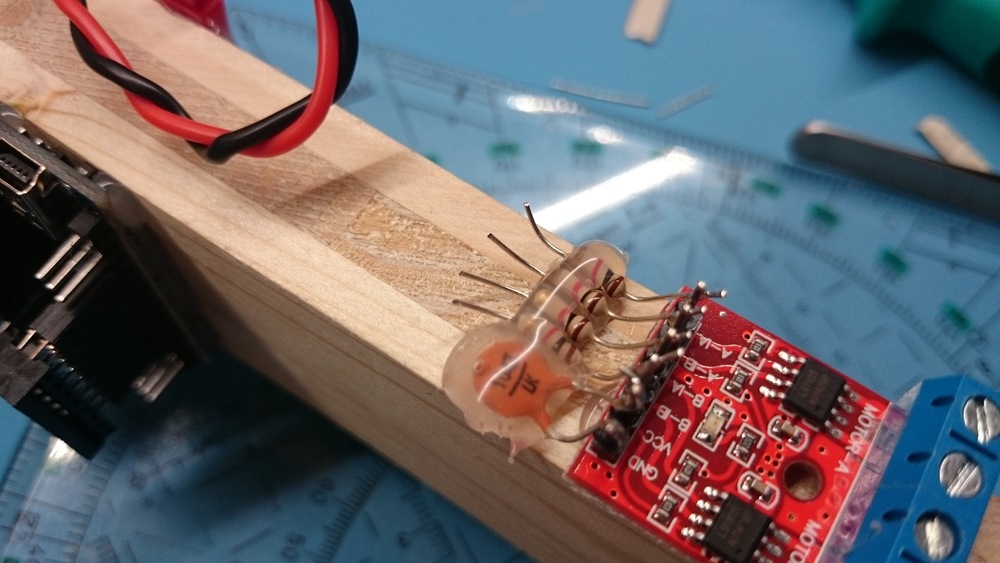
Ansteuerleitungen der Doppel-H-Brücke
ablängen und sauber verlöten:
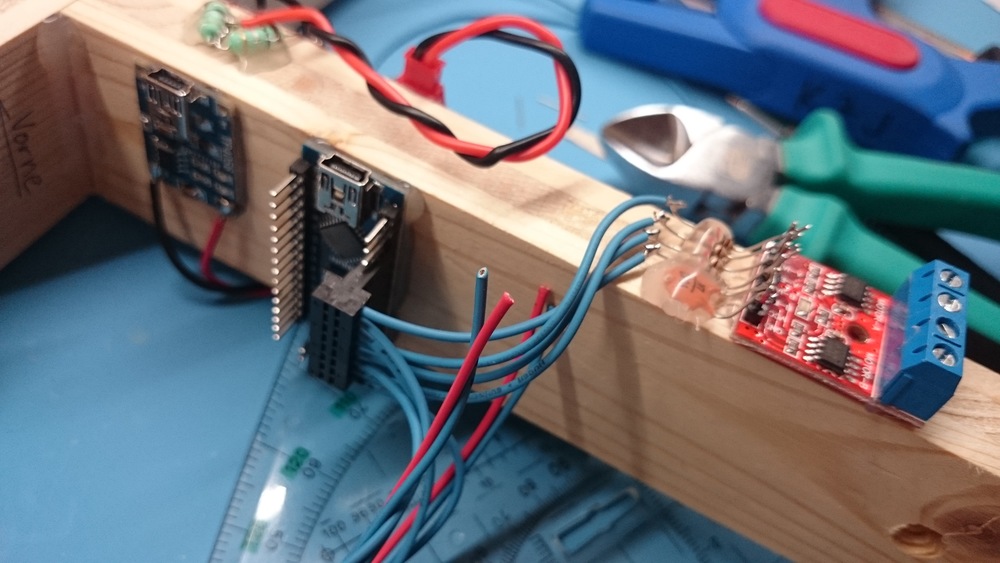
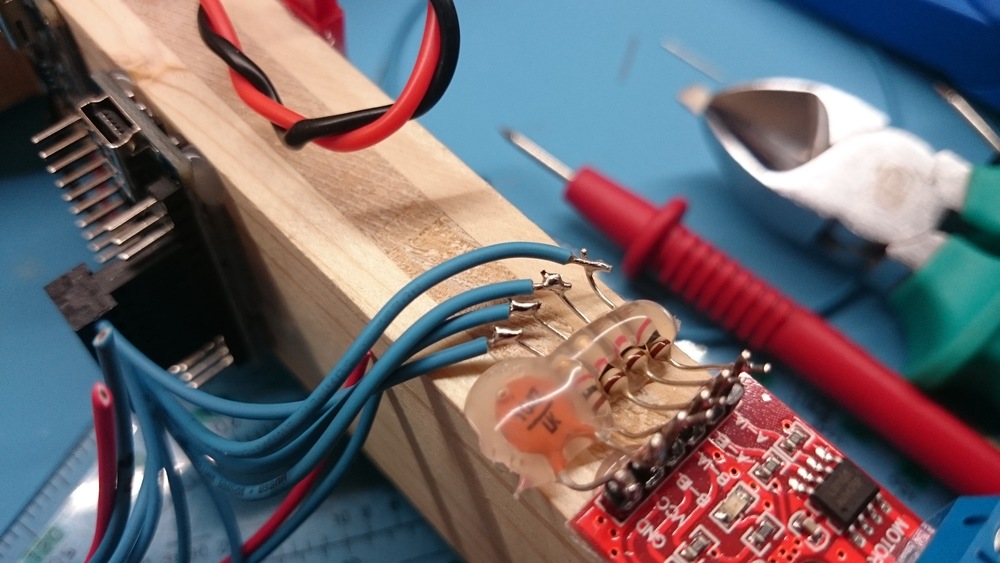
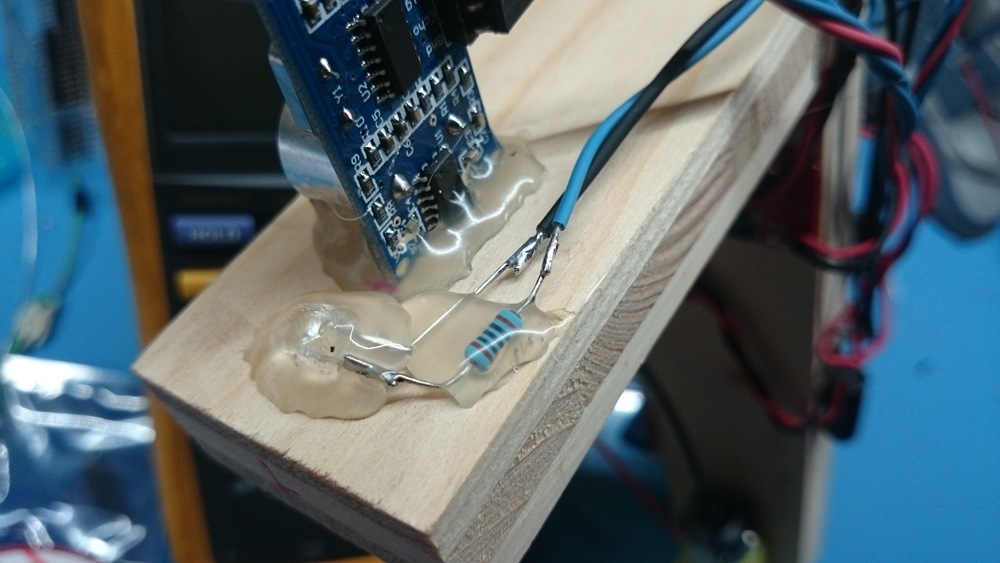
Die LEDs
mit dem langen Anschluss an der Außenseite neben dem Ultraschallsensor fixieren:
Dann den kurzen Anschluss abwinkeln, den langen kürzen und den Widerstand fixieren:
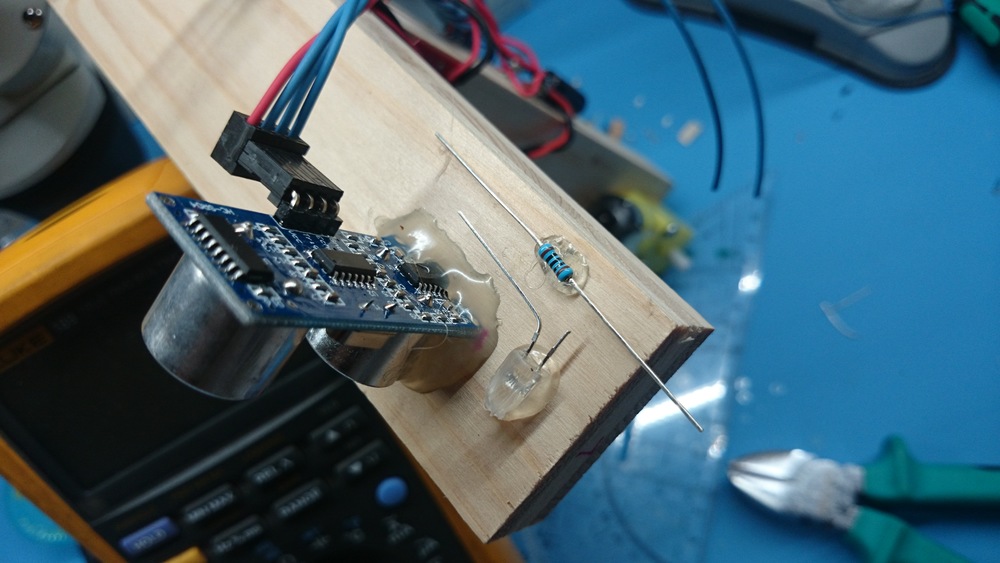
Nach dem Anschließen schaut es so aus:
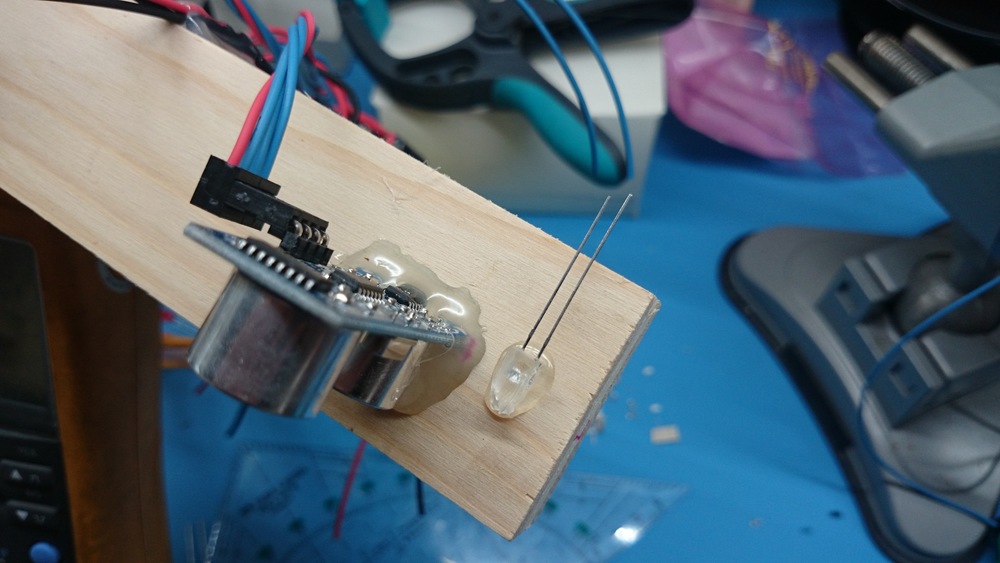
Motoren vorbereiten
- Motor so drehen, dass der gelbe Nupsi und die Motor-Anschlüsse auf der gleichen Seite sind
- Polarität der Anschlüsse ausmessen (mit Labornetzteil)
- Kondensatoren anlöten
- Mit je zwei Schrauben am Rahmen montieren
Restlichen Drähte Anschließen
- Versorgung der Doppel-H-Brücke (schön verdrillen)
- Motoren (Achtung Polarität beachten und schön verdrillen)
Zum Schluss die Batterie
Diese wird verklebt und zusätzlich mit Kabelbinder fixiert (2 Stück, 3.6x200mm).
Dann werden die Drähte an den Batteriepolen angelötet.
ACHTUNG: nichts kurzschließen!
Testsoftware
Zum überprüfen aller Sensoren und Aktoren wird ein Testprogramm aufgespielt.
Funktioniert alles, kommt die
Robo-Software
drauf. Wenn alles richtig gemacht wurden, balanciert nun der Robo und folgt deinen Kommandos.