
Dies ist eine alte Version des Dokuments!
Inhaltsverzeichnis
Foto-Reihe für den Zusammenbau, V3.3
Erste Lötübung
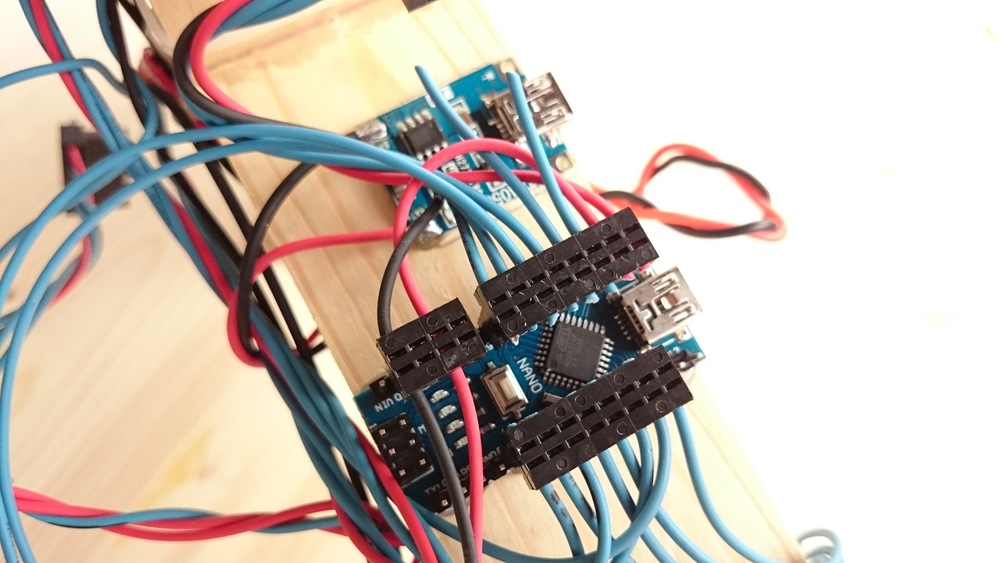
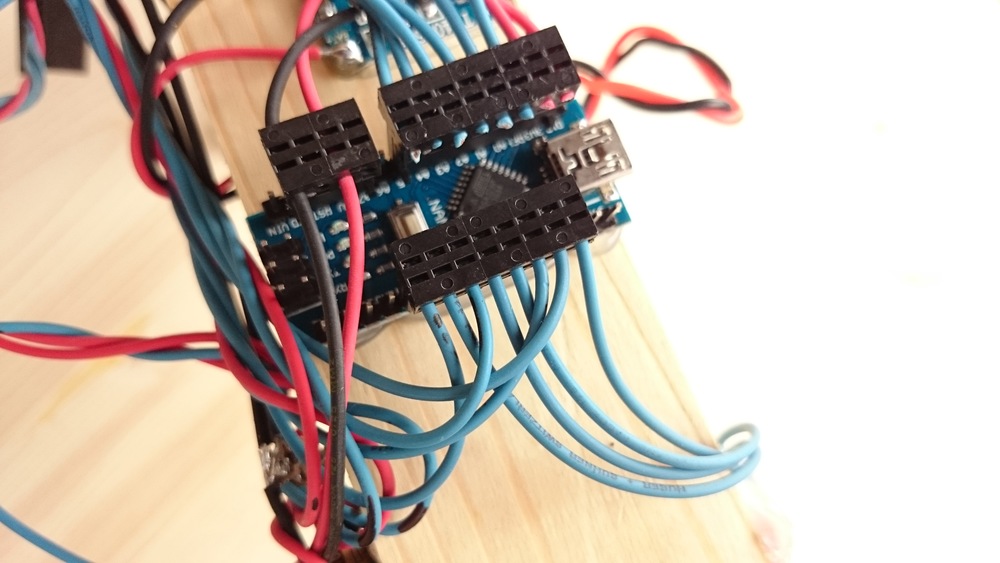
Stiftleisten des Arduinos einlöten:
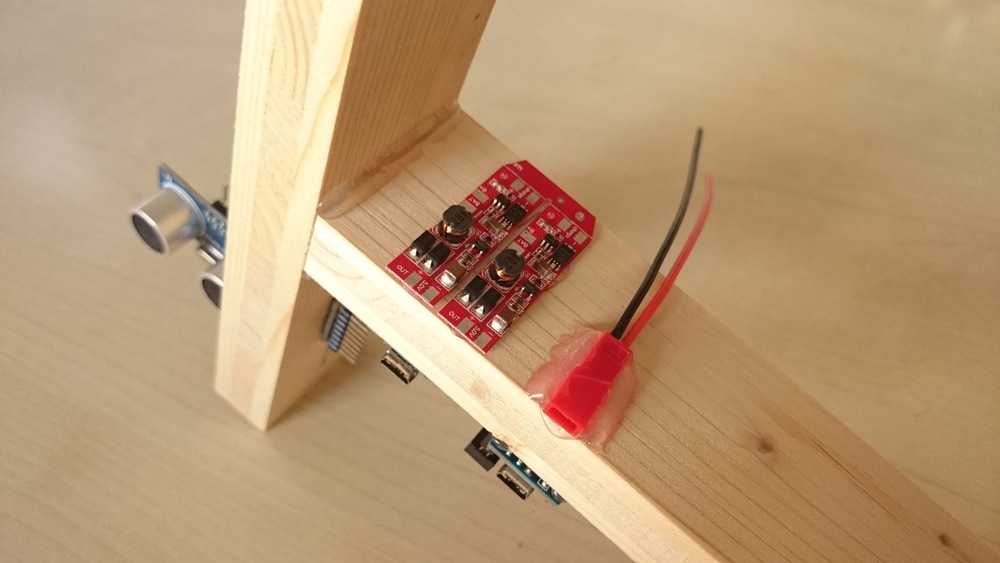
Der Stecker
muss gut fixiert werden; die schwarzen Knubbel (Induktivitäten) zeigen nach oben (Charge = Rückseite, +5V = Vorderseite):
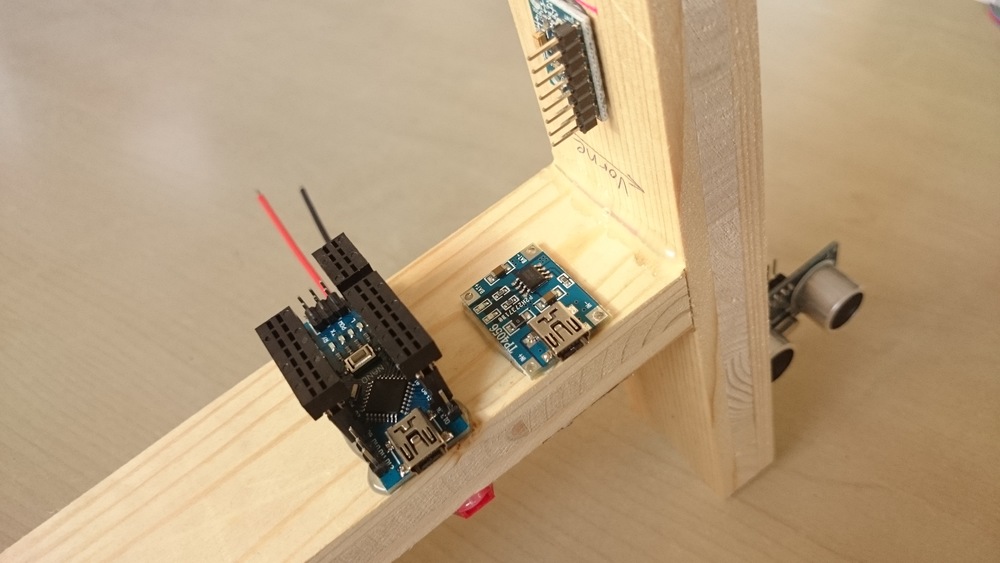
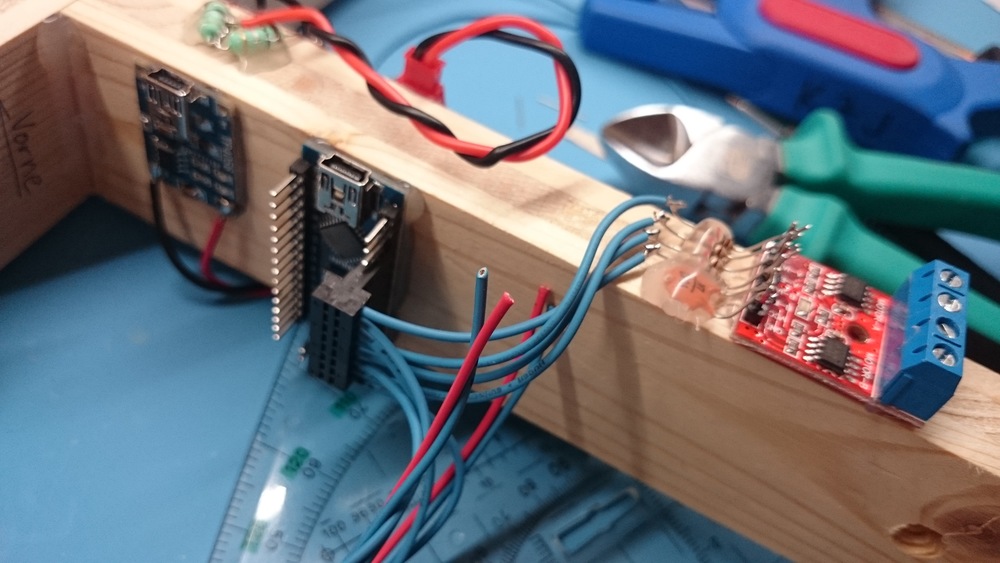
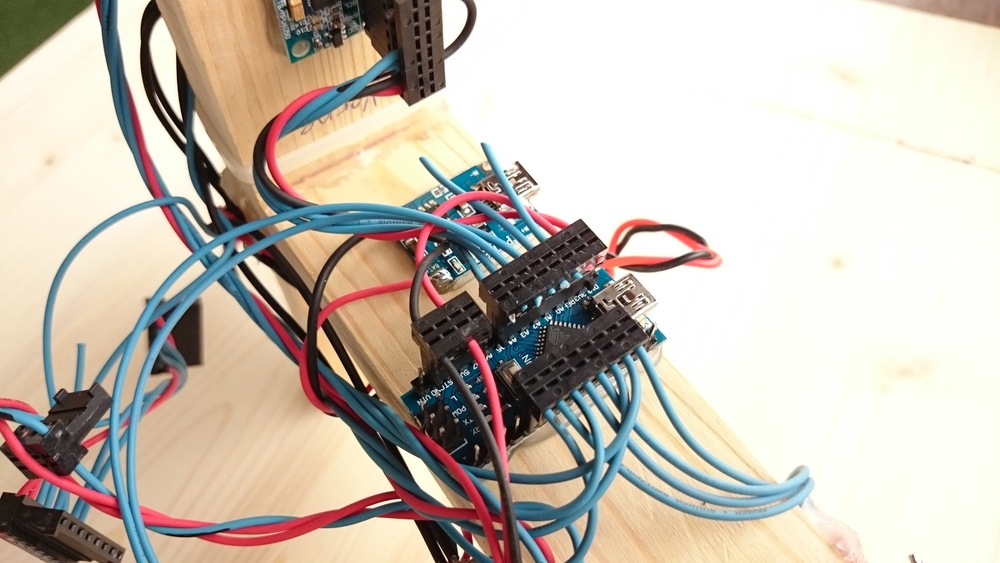
Der Arduino und das Lademodul.
Beide USB-Buchsen zeigen nach vorne:
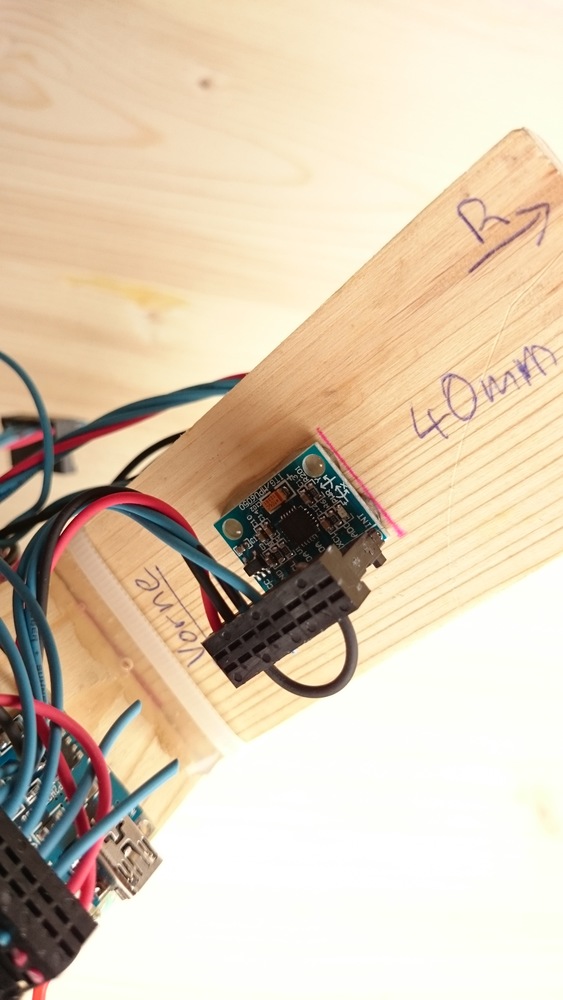
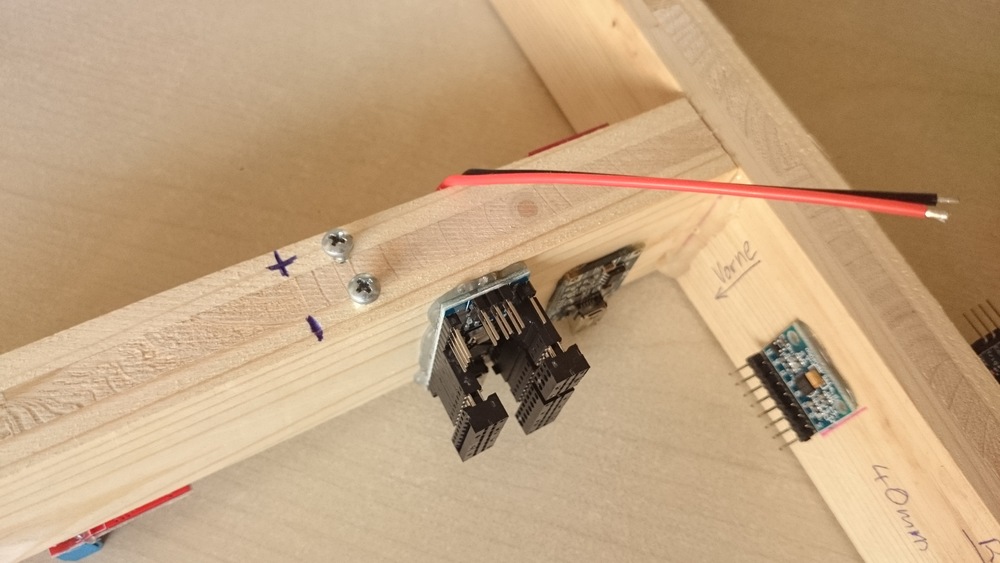
Die IMU
40mm vom Rand nach innen rutschen, Pins sind an der Vorderseite des Robos. Die IMU ist auf der rechten Seite:
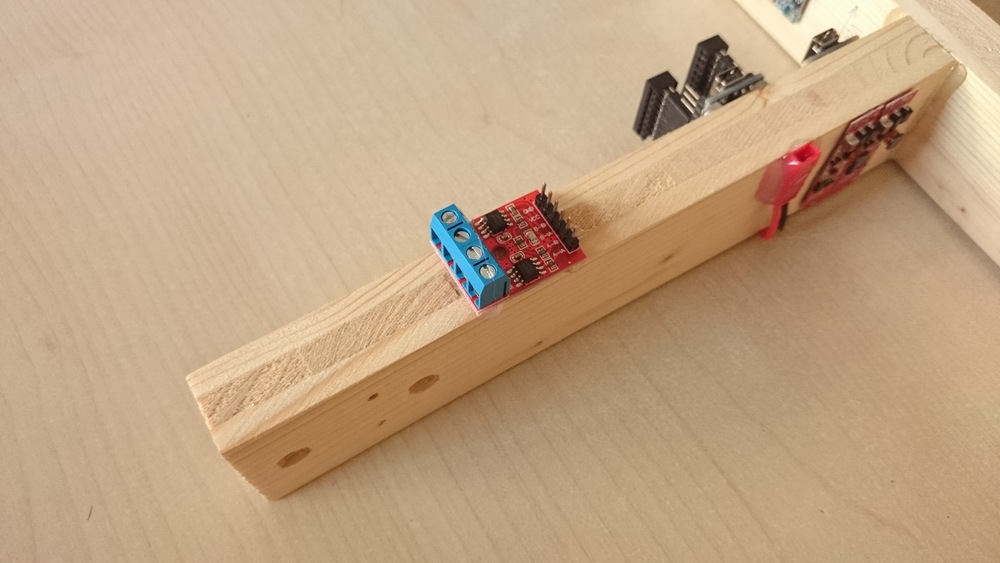
Die Doppel-H-Brücke
ist 60mm vom unteren Rand entfernt. Schraubklemmen zeigen nach unten:
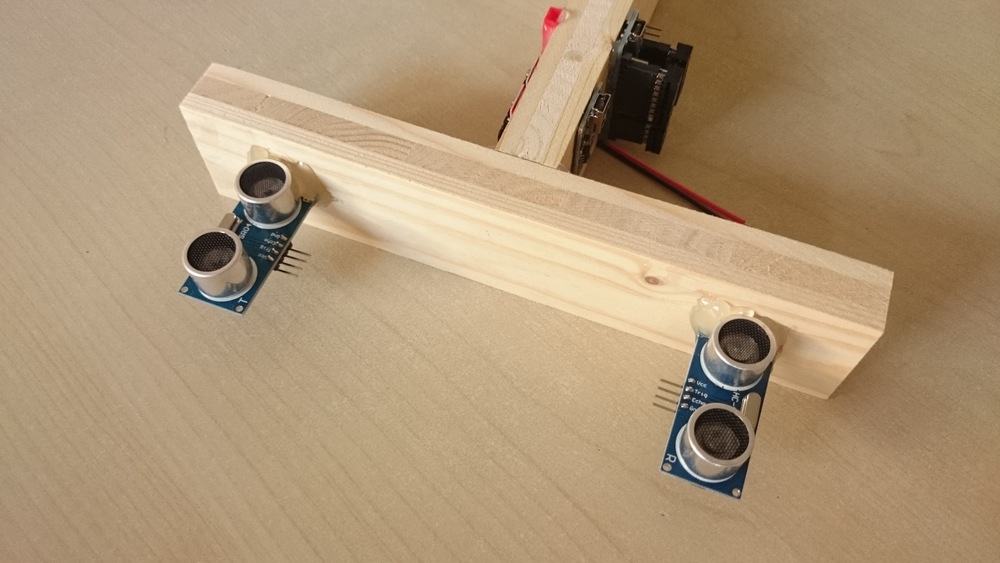
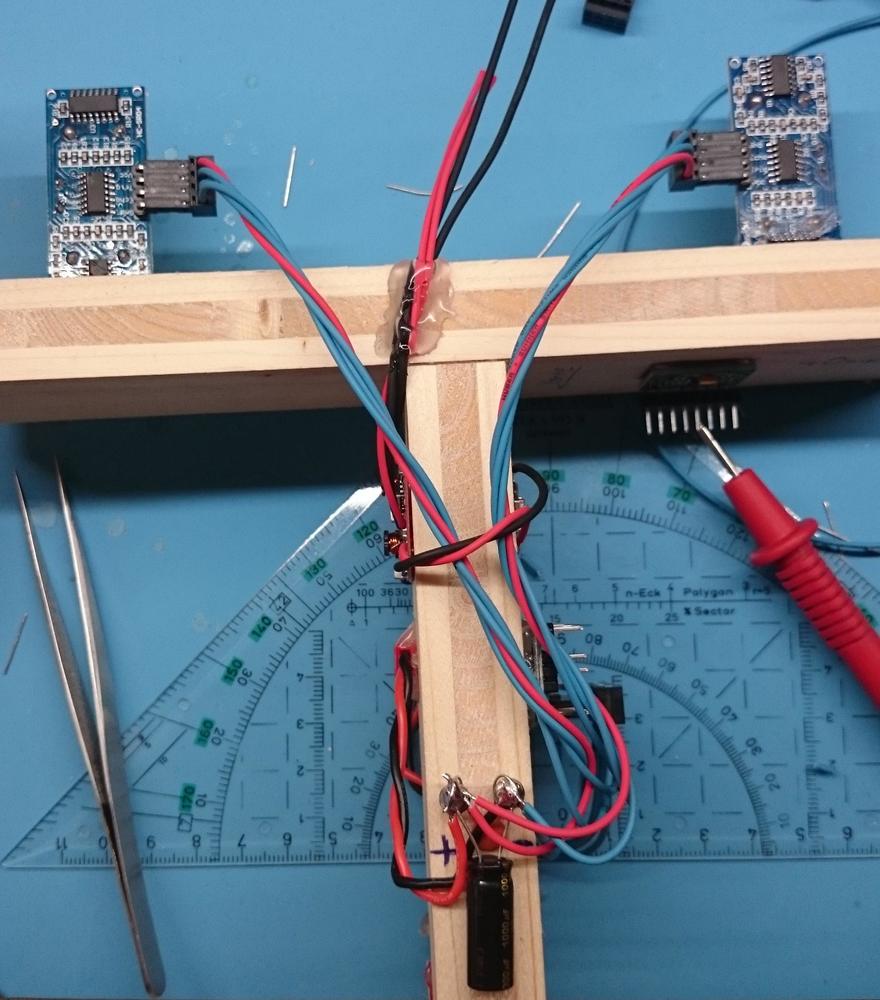
Die Ultraschallsensoren
sind je 20mm vom Rand nach innen gerückt, und zeigen gerade nach vorne:
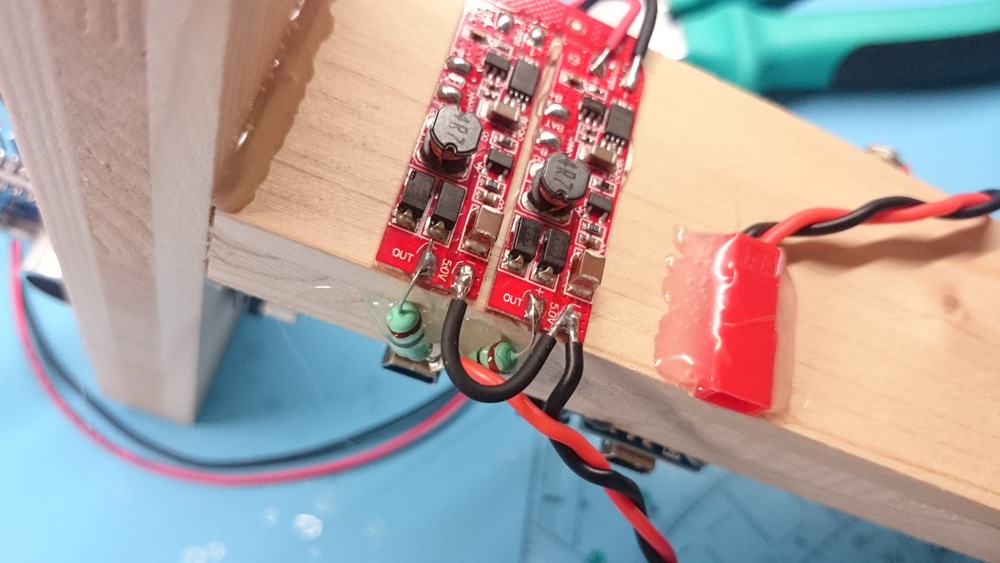
Die Schrauben
sind 125mm von unten entfernt und sind die Lötstützen für die 5V-Versorgung. Polarität wie im Foto:
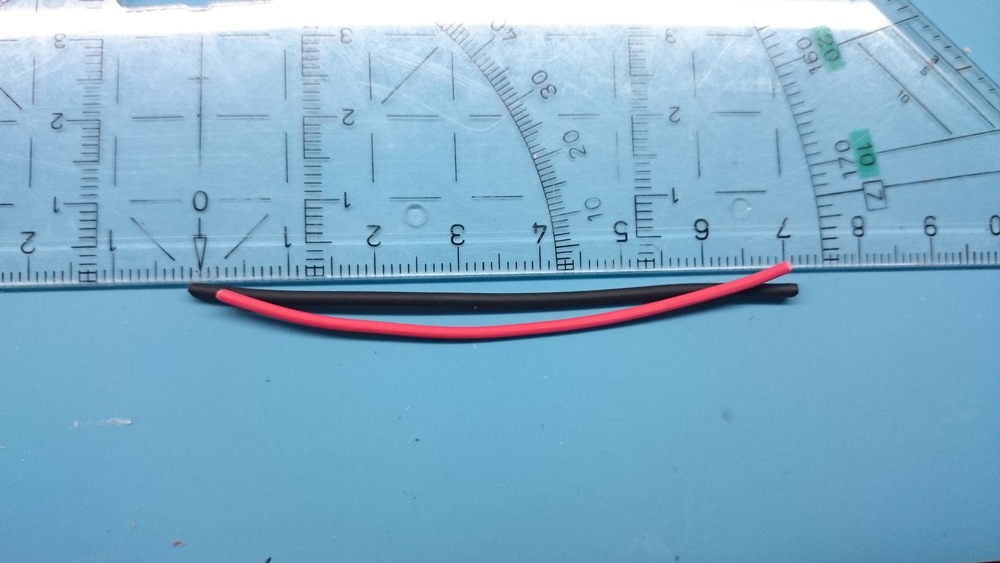
Steckerkabel
etwas kürzen und anlöten (rot ist plus, schwarz minus). Davor werden die Schrauben ordentlich verzinnt (Achtung: das dauert ein wenig, bis die Schrauben die Temperatur erreichen).
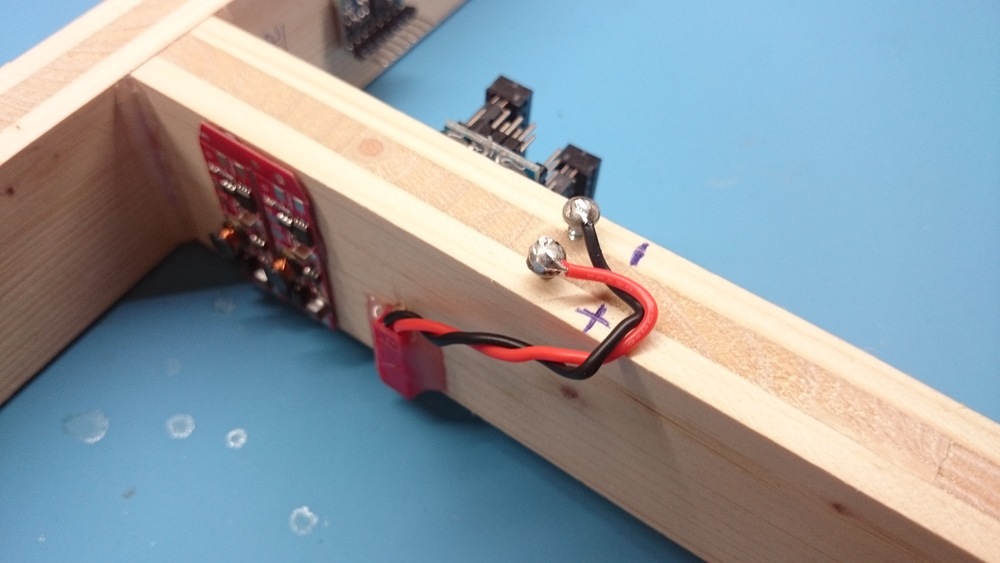
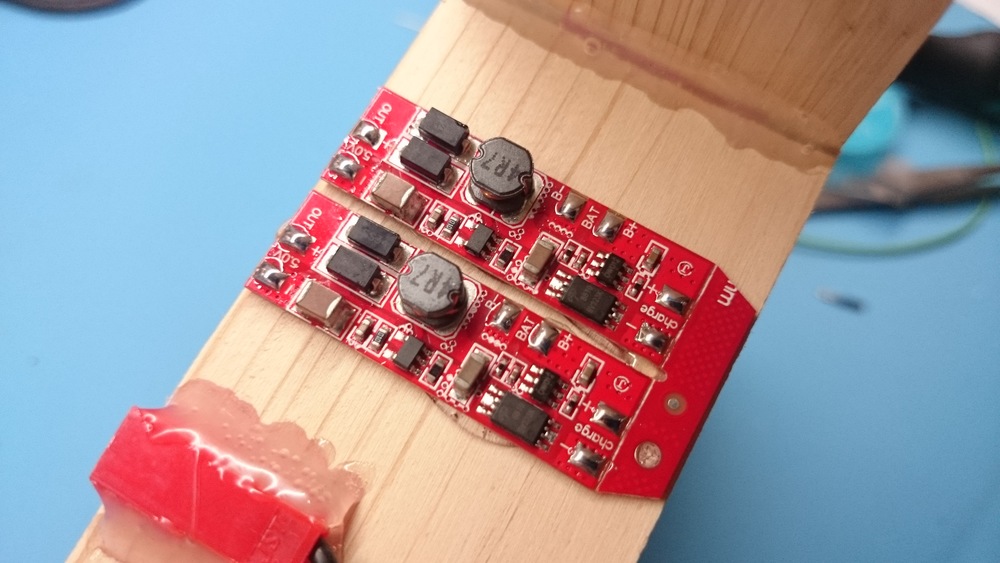
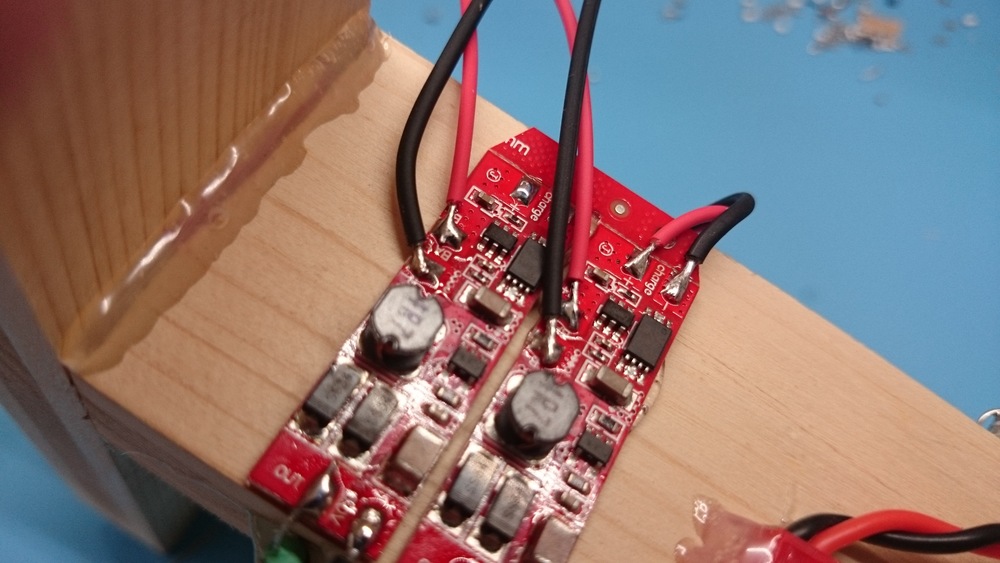
Die Pads der BMS
werden verzinnt. Die Lötstellen sollten gleichmäßig rund und glänzend sein.
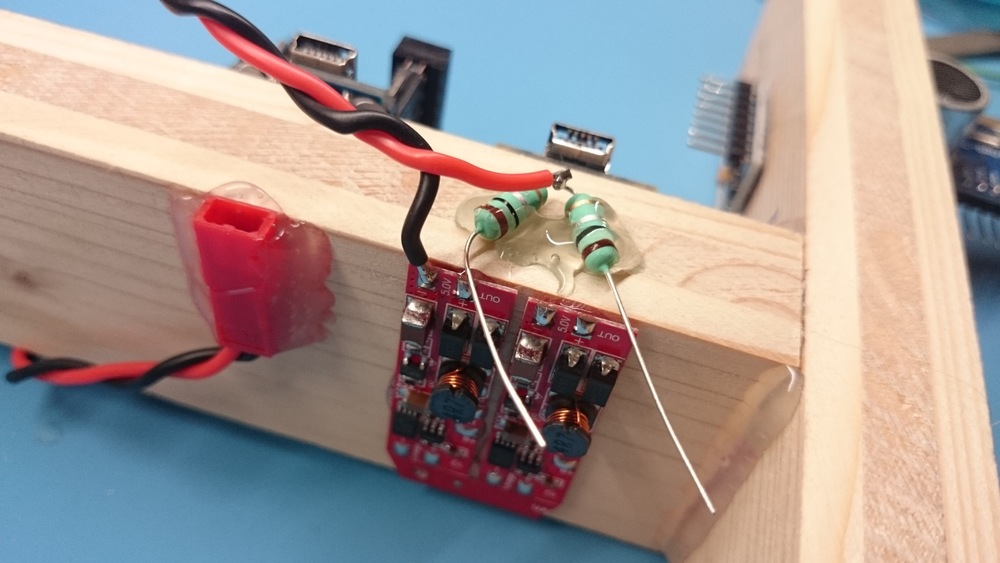
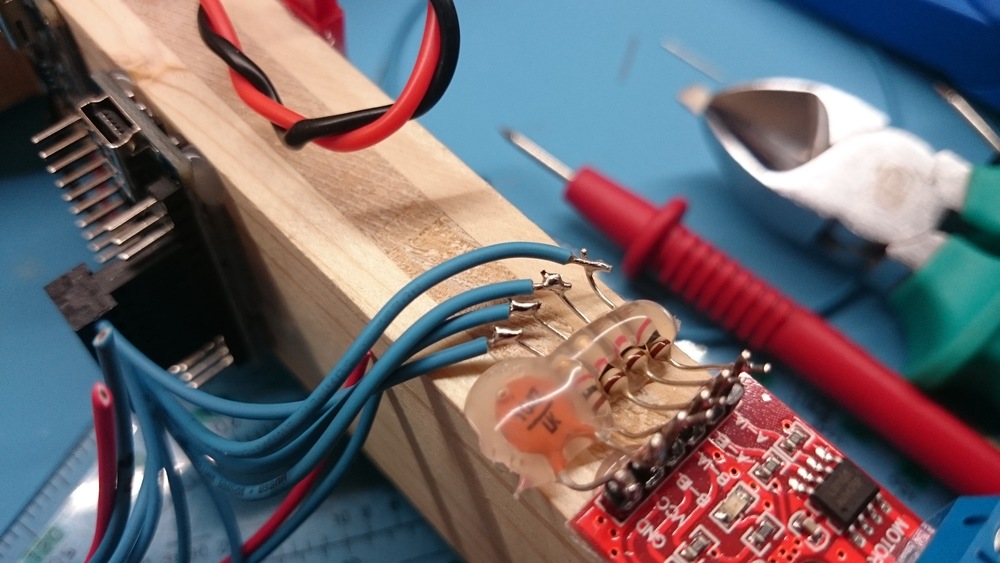
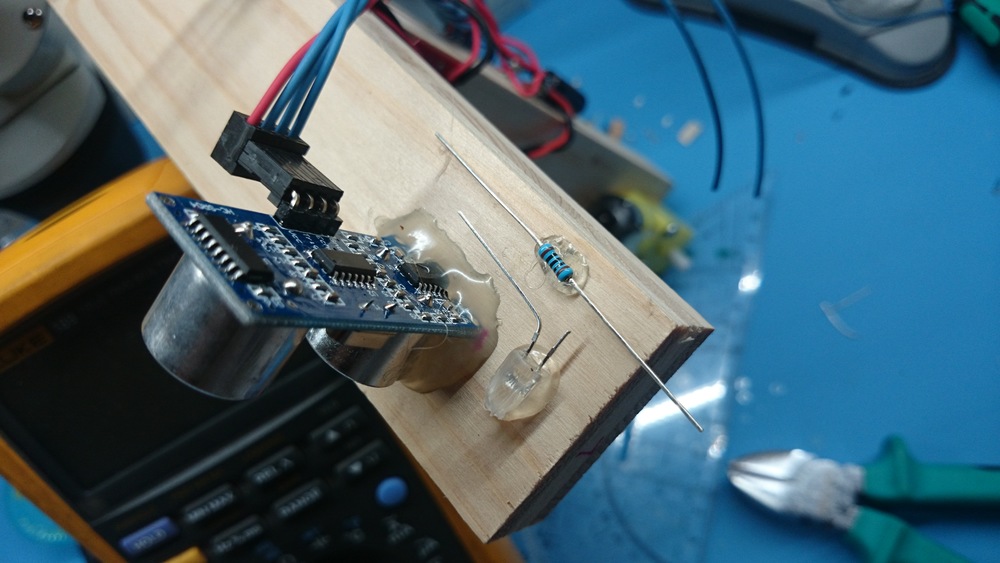
Die 0.1Ω-Widerstände
werden verdrillt und dort verlötet. Dann werden sie am Rahmen fixiert, sodass die langen Drähte dann gut bei den +5V der BMS angeschlossen werden können:
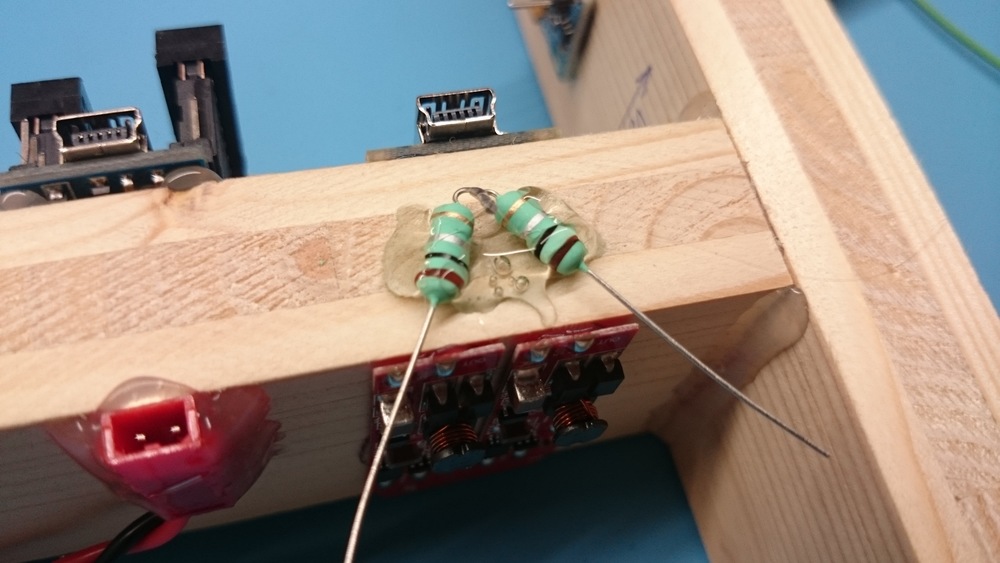
Das Buchsen-Kabel
wird am Minus-Pol des unteren BMS und an der Mittelanzapfung der Widerstände angelötet.
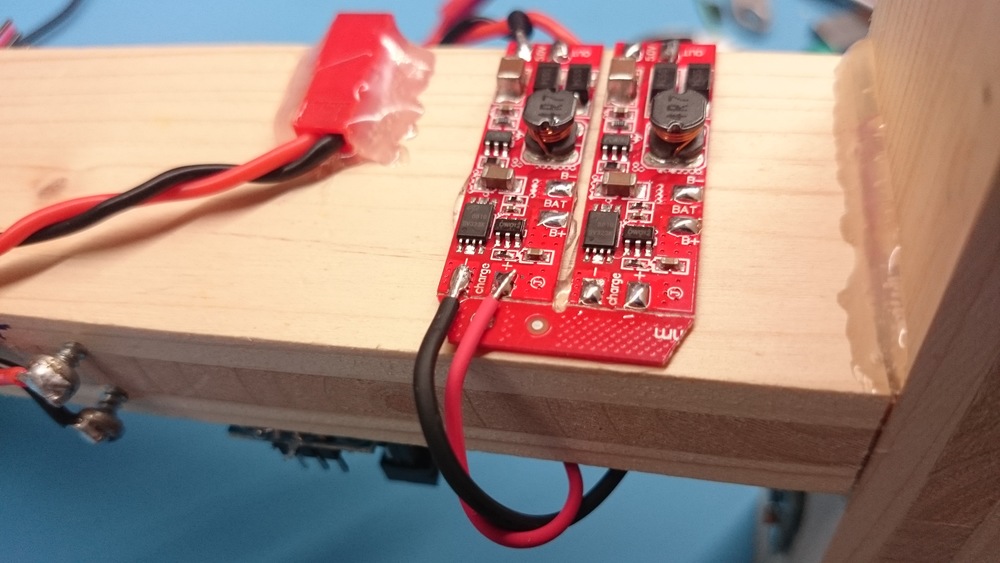
Die Masse-Brücke
ist 30mm lang und verbindet die beiden BMS:
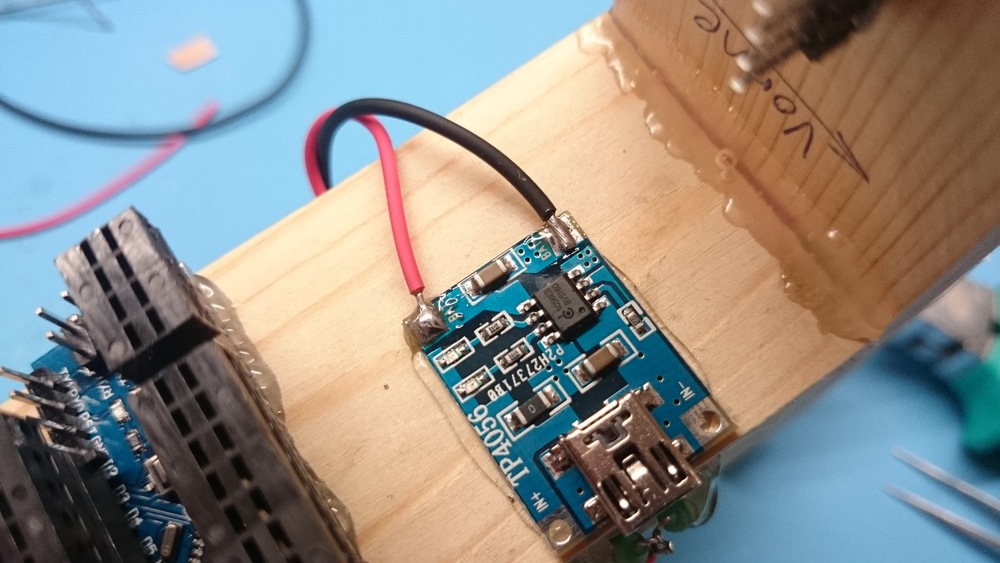
Das Lademodul
wird mit 7cm-langen Drähten mit einem der beiden BMS verbunden. Plus auf Plus, Minus auf Minus.
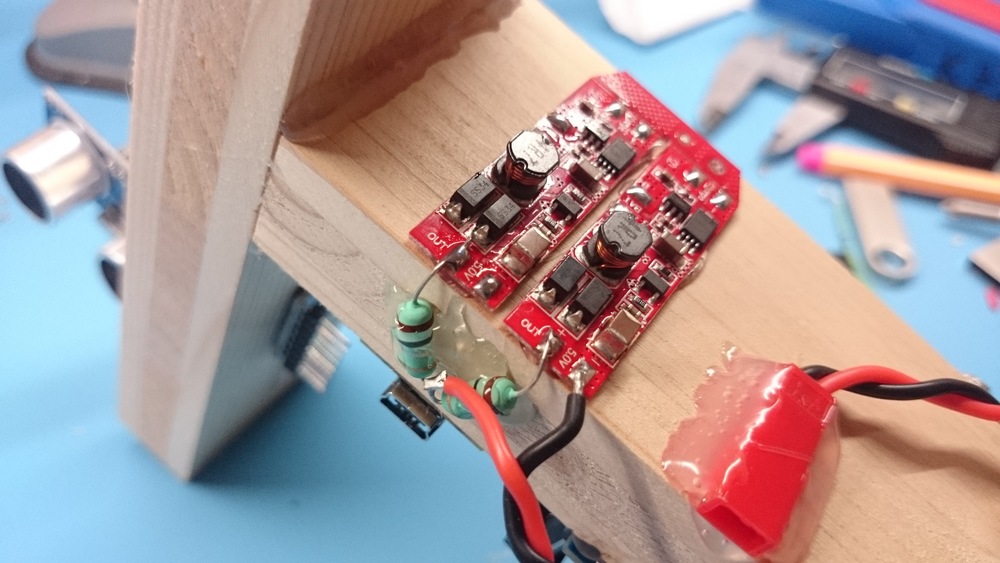
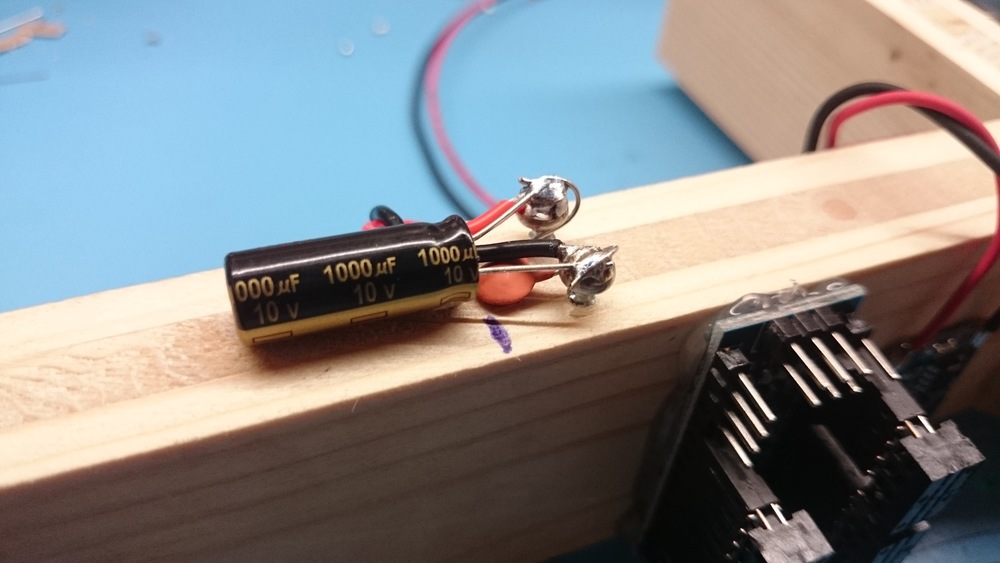
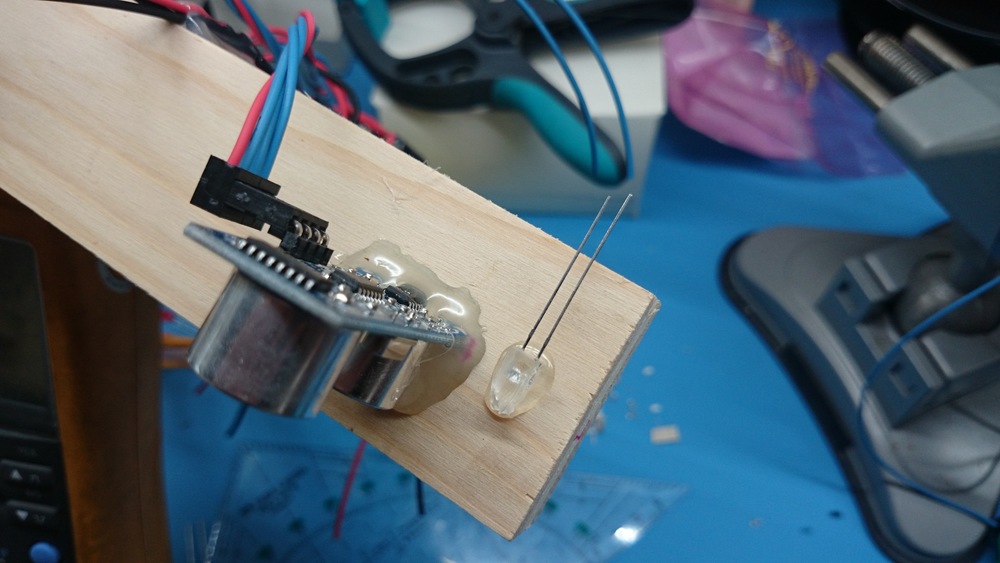
Der ELKO und KerKo
(Aluminium-Elektrolytkondensator und Keramikkondensator) werden mit den Lötstützen verbunden. WICHTIG: Polarität des ELKOs (Minus-Markierung muss auf Minus-Pol):
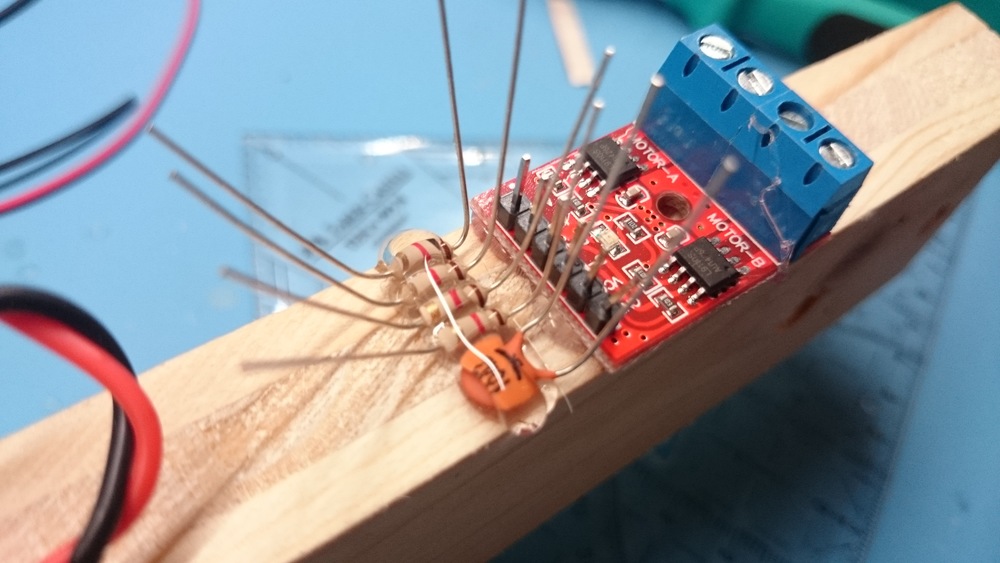
Widerstände und den Kondensator
zuerst zurechtbiegen, und diese dann in eine Spur Heißkleber drücken.
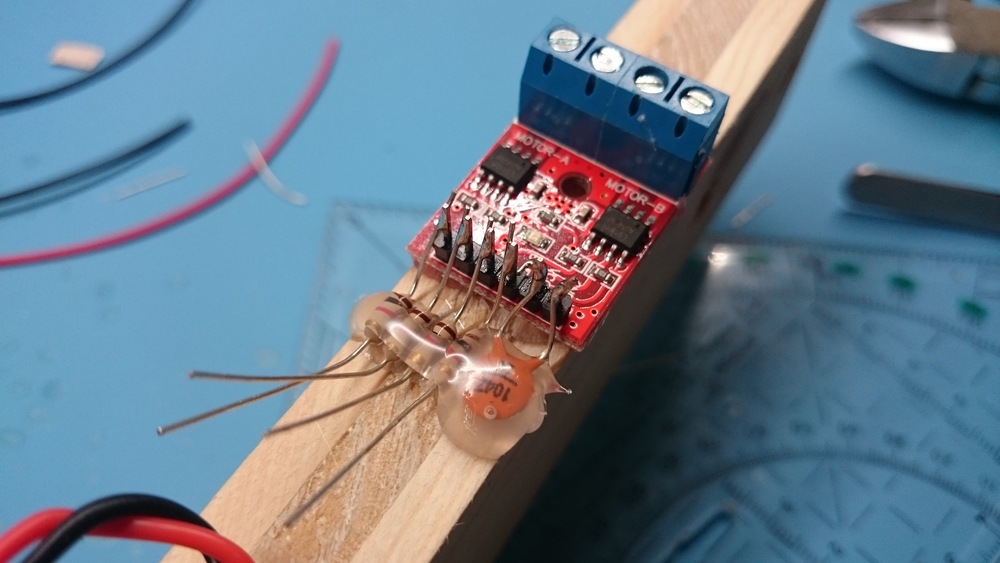
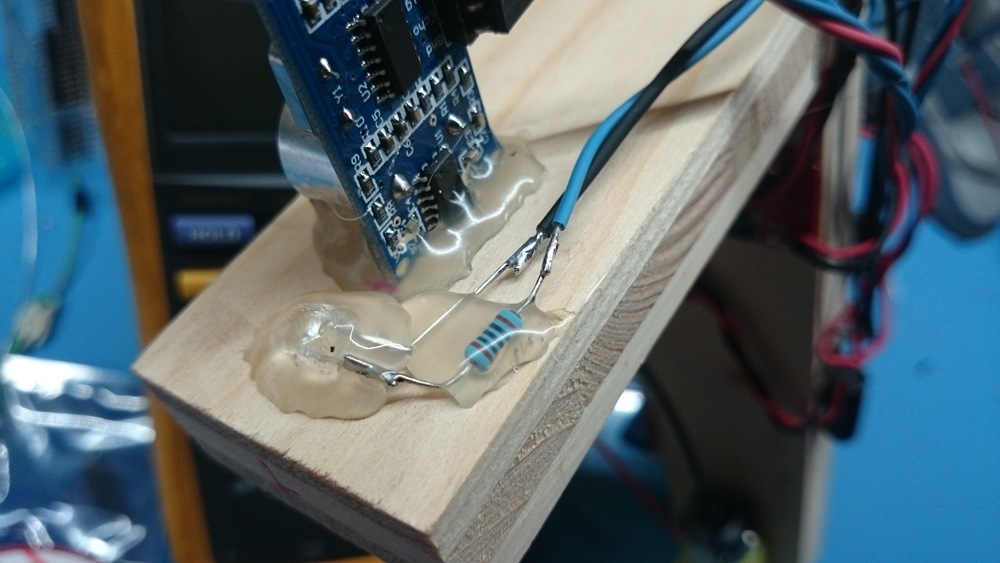
Anschließend mit reichlich Kleber fixieren:
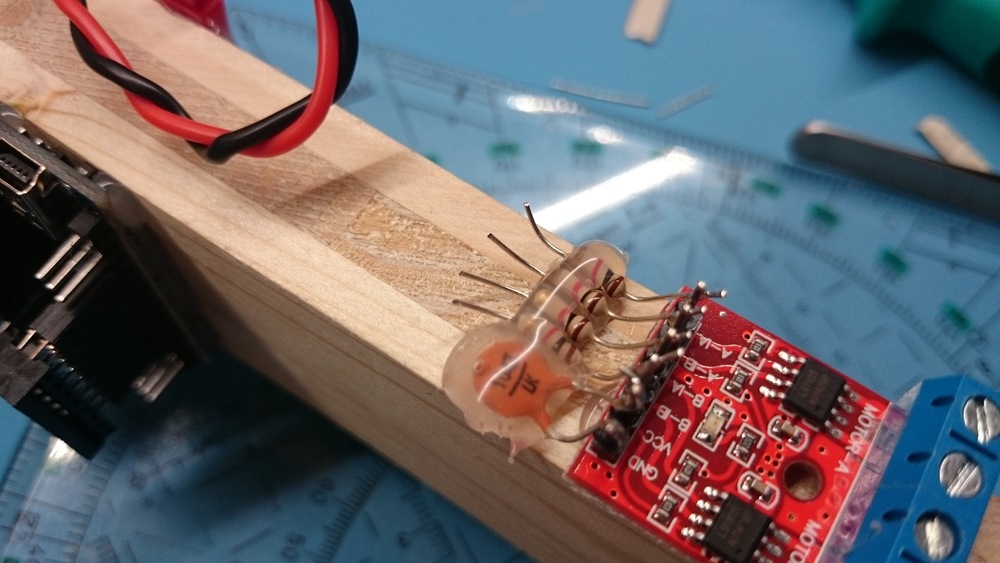
Dann alle 6 Anschlüsse sauber verlöten:
Die Batterie-Drähte
mit je 12cm werden schon mal an die BMS gelötet. Drähte so kurz wie nötig abisolieren.
Überschrift
Überschrift
Überschrift
Überschrift
Überschrift
Überschrift
Überschrift
Überschrift
Überschrift
Überschrift